
Contrôle PID d'une Articulation Robotique avec Arduino
Apprenez à concevoir et modéliser une articulation robotique avec Arduino UNO, servomoteur SG90 et régulation PID. Guide complet de modélisation physique.
Maquette expérimentale : une articulation robotique
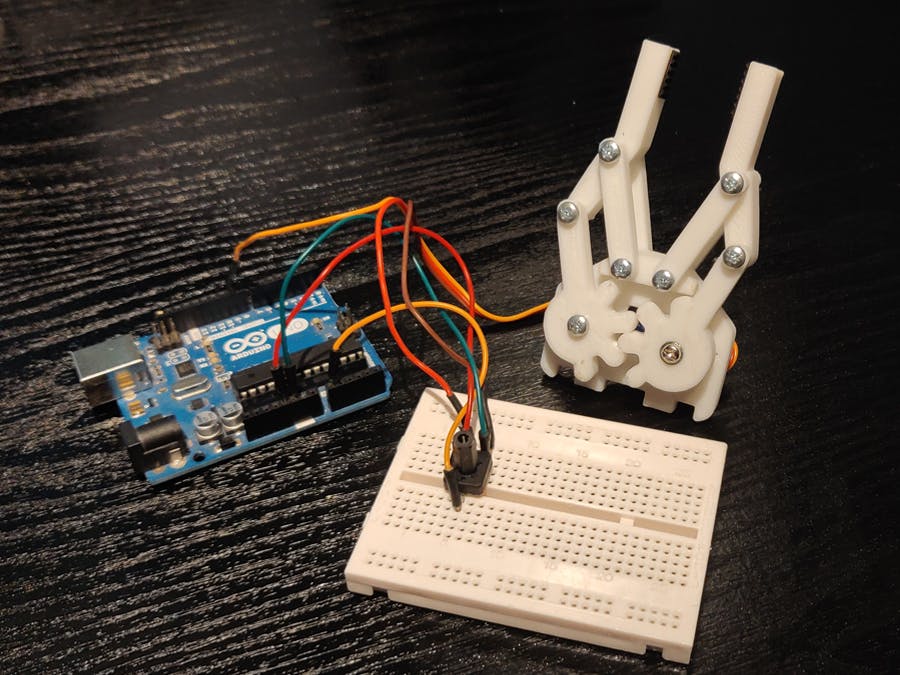
La maquette repose sur une carte Arduino UNO, qui joue le rôle de calculateur numérique et exécute l'algorithme de régulation. Le servo-moteur SG90, en tant qu'actionneur, entraîne un bras mécanique en aluminium auquel peut être suspendue une charge de 100 g. Un potentiomètre rotatif, utilisé comme capteur de position angulaire, renvoie en retour la mesure vers l'Arduino. L'ensemble constitue un banc d'essai compact permettant d'étudier expérimentalement l'influence de la période d'échantillonnage Ts sur les performances de la boucle de régulation.
Arduino UNO (calculateur)
Servo SG90 (actionneur)
Potentiomètre (capteur)
Bras mécanique alu
2.1 — Modèle électrique : loi des mailles
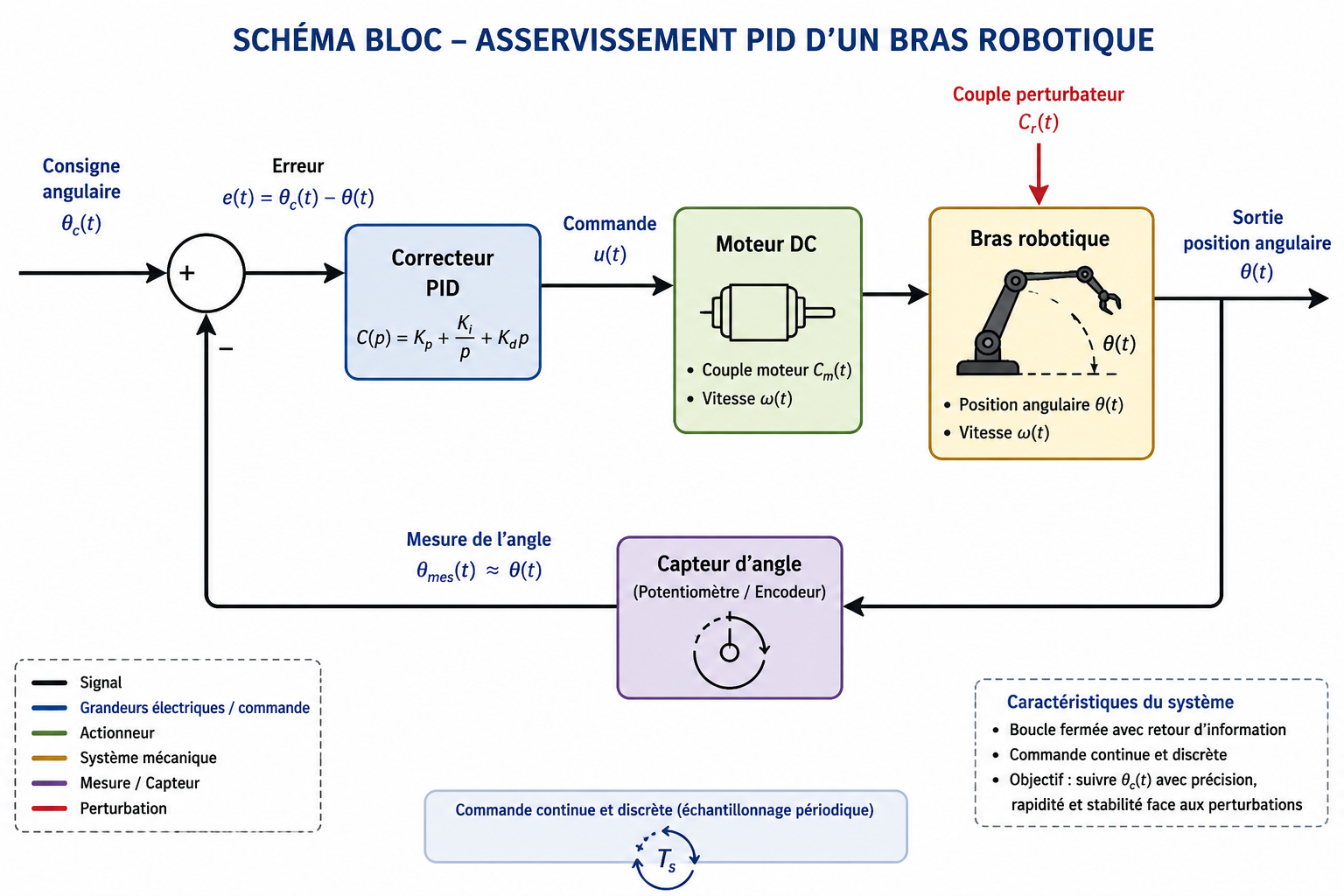
Schéma bloc de la boucle fermée
Le schéma ci-contre représente l'architecture complète du système asservi. La consigne angulaire θ_c(t) est comparée à la position mesurée θ_mes(t) pour produire une erreur e(t). Le correcteur PID calcule alors une commande u(t) qui alimente le moteur DC. Ce dernier développe un couple C_m(t) entraînant le bras robotique. Des perturbations (couple perturbateur C_r(t)) peuvent s'ajouter. Un capteur (potentiomètre ou encodeur) mesure la position réelle θ(t) et la renvoie vers l'entrée, fermant ainsi la boucle. Cette structure permet un suivi précis, rapide et stable de la consigne, malgré les perturbations et les variations du système.
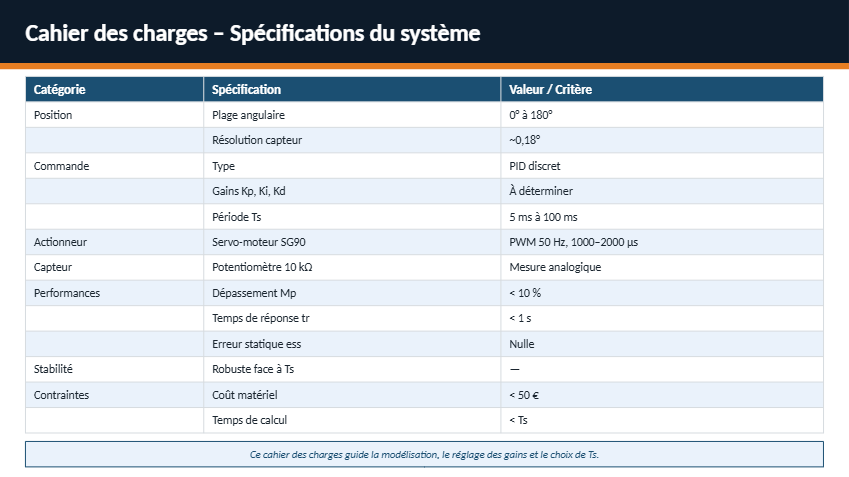
Cahier des charges – Spécifications du système
Le tableau ci-dessous résume les objectifs de performance à atteindre : plage angulaire, résolution, temps de réponse, dépassement, erreur statique, robustesse et contraintes matérielles. Ces spécifications guideront le réglage des gains PID (Kp, Ki, Kd) ainsi que le choix de la période d'échantillonnage Ts. La confrontation entre les résultats théoriques et les mesures expérimentales permettra ensuite de vérifier si l'ensemble de ces exigences est effectivement satisfait.
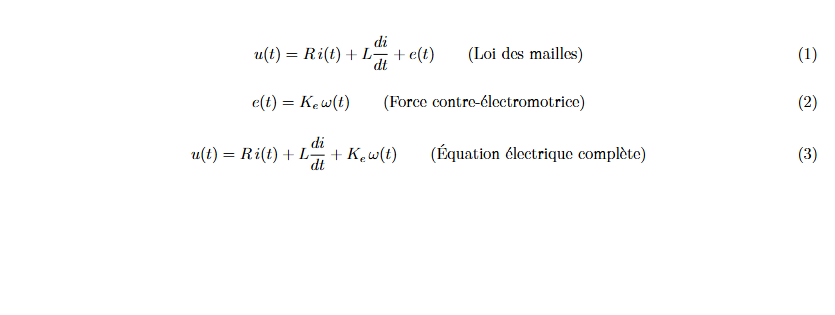
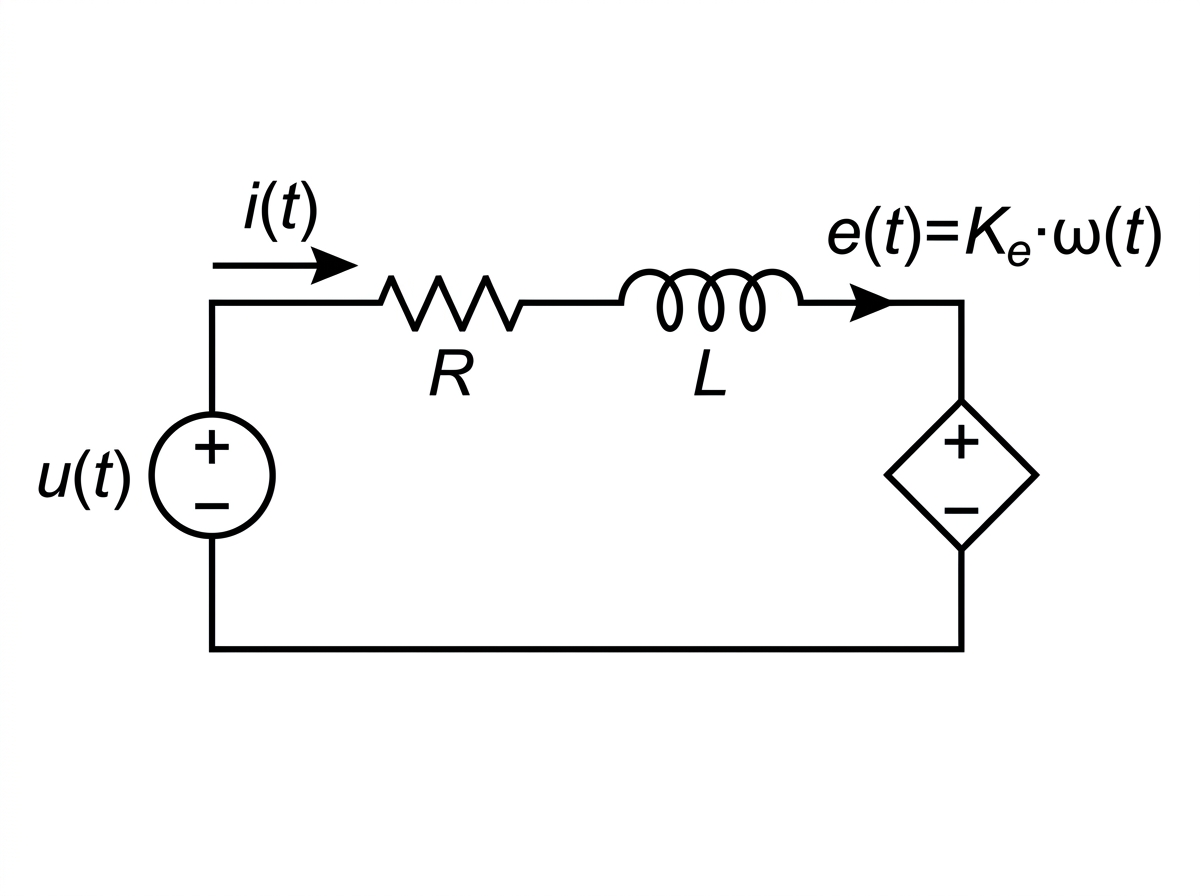
Modèle électrique : loi des mailles
Le comportement électrique du moteur à courant continu est régi par la loi des mailles : la tension d'alimentation u(t) équilibre la chute ohmique R·i(t), la chute inductive L·di/dt et la force contre-électromotrice e(t) = Kₑ·ω(t). Cette dernière traduit la loi de Faraday : la rotation du rotor génère une tension proportionnelle à la vitesse angulaire ω(t), Kₑ étant une constante intrinsèque du moteur. En pratique, pour un petit moteur, L est de l'ordre de quelques mH et R de quelques ohms, ce qui donne τₑ = L/R ≈ 1 ms, très petite devant la constante de temps mécanique (≈ 100 ms) ; le terme L·di/dt est donc négligeable en régime de commande de position. Ce modèle constitue le cœur du servomoteur SG90 de la maquette , lequel intègre en outre un réducteur, un potentiomètre et une électronique embarquée.
u(t) = R·i(t) + L·di/dt + Kₑ·ω(t)
Moteur DC – cœur du servomoteur SG90
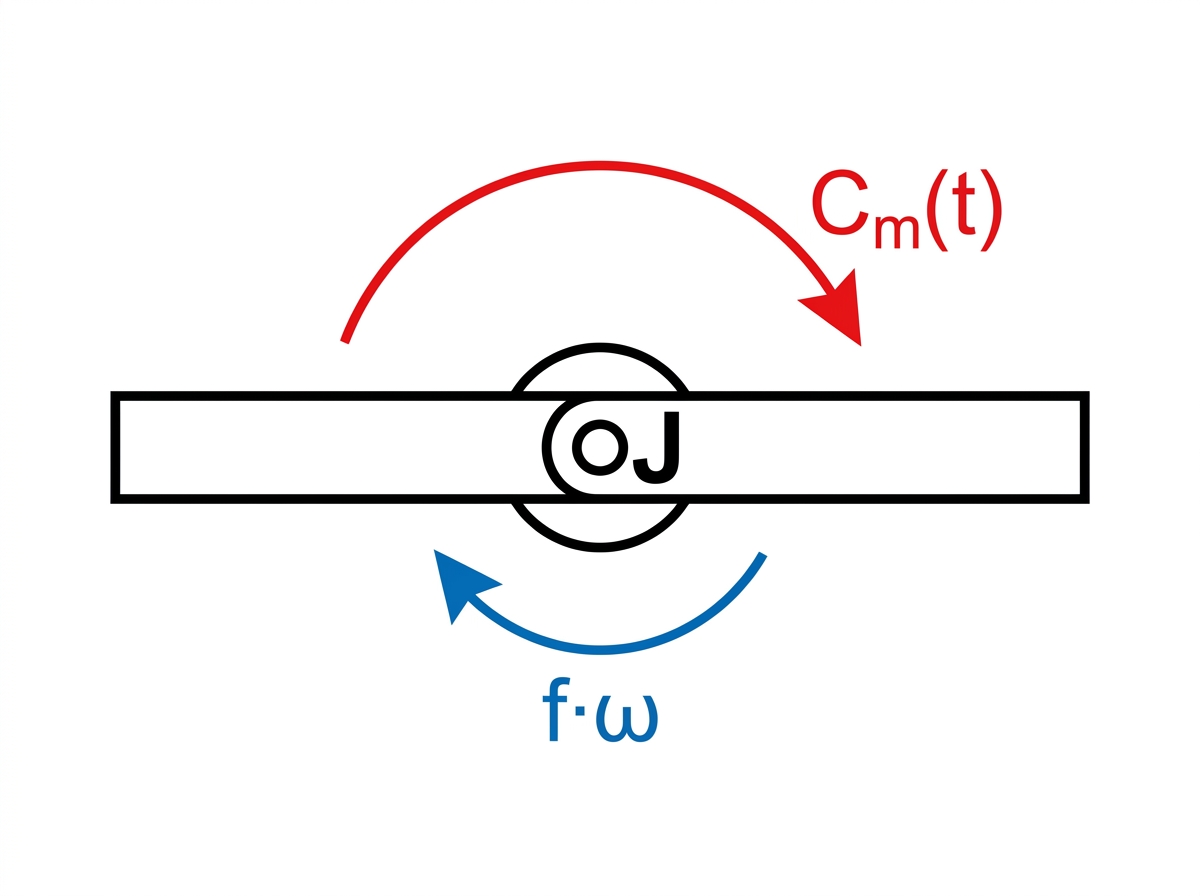
Modèle mécanique : théorème du moment dynamique
Le mouvement angulaire de l'ensemble bras + moteur est régi par le théorème du moment dynamique : le couple moteur C_m(t) doit vaincre l'inertie totale J des parties tournantes et le frottement visqueux f·ω, d'où J·dω/dt + f·ω = C_m(t). Dans un moteur à courant continu, le couple électromagnétique résulte de l'interaction entre le courant i(t) circulant dans l'induit et le champ magnétique des aimants permanents ; il est proportionnel au courant : C_m(t) = K_c·i(t), où K_c est la constante de couple (en N·m/A). Physiquement, l'inertie J traduit la résistance aux variations de vitesse — plus J est grand, plus l'accélération est faible pour un même couple —, tandis que f dissipe de l'énergie et assure un amortissement naturel. Ce modèle s'applique à l'ensemble bras + moteur, le moteur à courant continu constituant le cœur du servomoteur SG90 (option 2).
J·dω/dt + f·ω = K_c·i(t)
Couple moteur = K_c · i(t)
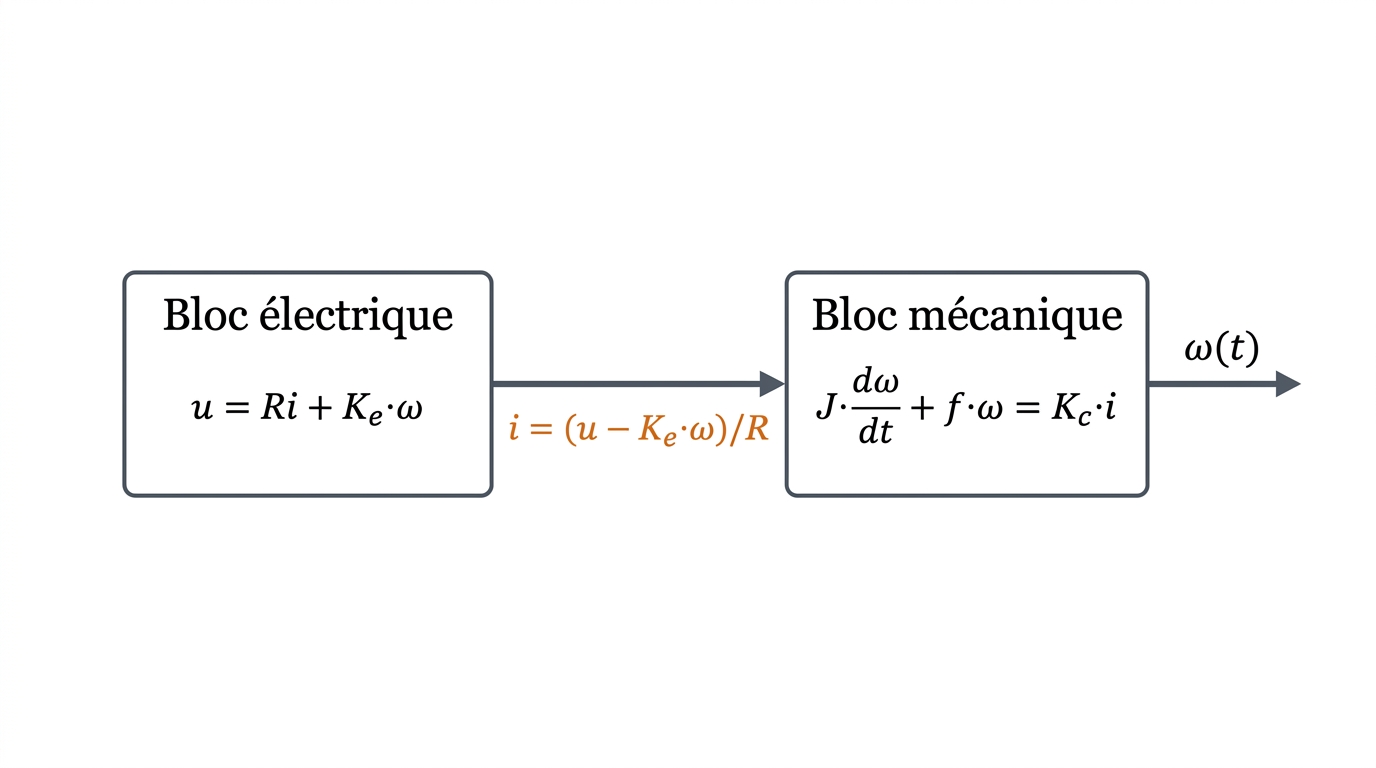
Couplage électromécanique : élimination du courant
En négligeant l'inductance L (τₑ = L/R ≈ 1 ms ≪ τméc, justifié à la diapositive 2.1), l'équation électrique se réduit à u = R·i + Kₑ·ω, permettant d'exprimer le courant : i = (u − Kₑ·ω)/R. En substituant dans l'équation mécanique J·dω/dt + f·ω = Kc·i, on obtient une équation différentielle du premier ordre reliant directement u(t) à ω(t). Le terme Kc·Kₑ/R vient s'ajouter au frottement mécanique f : c'est le freinage électromagnétique — plus le moteur tourne vite, plus la force contre-électromotrice freine le mouvement. Ce modèle couplé décrit l'ensemble bras + moteur DC, cœur du servomoteur SG90 (option 2).
i = (u − Kₑ·ω) / R
J·dω/dt + (f + Kc·Kₑ/R)·ω = (Kc/R)·u
Couplage électrique → mécanique après élimination de i(t)
- arduino
- robotique
- asservissement-pid
- servomoteur-sg90
- automatique
- ingenierie
- modelisation-physique