Asservissement PID d'une Articulation Robotique - TIPE 2026
Modélisation et simulation d'un moteur DC pour prothèse robotique. Synthèse PID, méthode de Ziegler-Nichols et validation expérimentale sur Arduino.
THÈME : CYCLE ET BOUCLE
Asservissement en position d'une articulation robotique
Modélisation, synthèse PID et validation expérimentale
Nom : EL AQANI Mohamed Taha
Numéro de candidat : ___________
Filière : MP
Année : 2026
TIPE — Oral de présentation
[IMAGE 10] — Le cycle fondamental : mesure, comparaison, correction — Fichier : ChatGPT Image May 27, 2026, 05_48_00 PM.png
1
Plan de la présentation
Introduction et contexte (slides 1–8)
Modélisation du moteur DC (slides 9–16)
Synthèse du correcteur PID (slides 17–24)
Simulation numérique (slides 25–30)
Implémentation expérimentale (slides 31–36)
Résultats et confrontation modèle/expérience (slides 37–43)
Conclusion et perspectives (slides 44–47)
TIPE 2026
2
Motivation : contexte des prothèses robotiques
Développement des prothèses myoélectriques actives (cf. Armiger et al., 2013)
Besoin de contrôle précis de la position angulaire
Moteur DC : actionneur courant dans les prothèses légères
Correcteur PID : solution robuste et implémentable sur microcontrôleur
Enjeu : reproduire le mouvement naturel avec précision et rapidité
Réf. [1] : Armiger et al., 'Enabling Closed-Loop Control of the Modular Prosthetic Limb', 2013
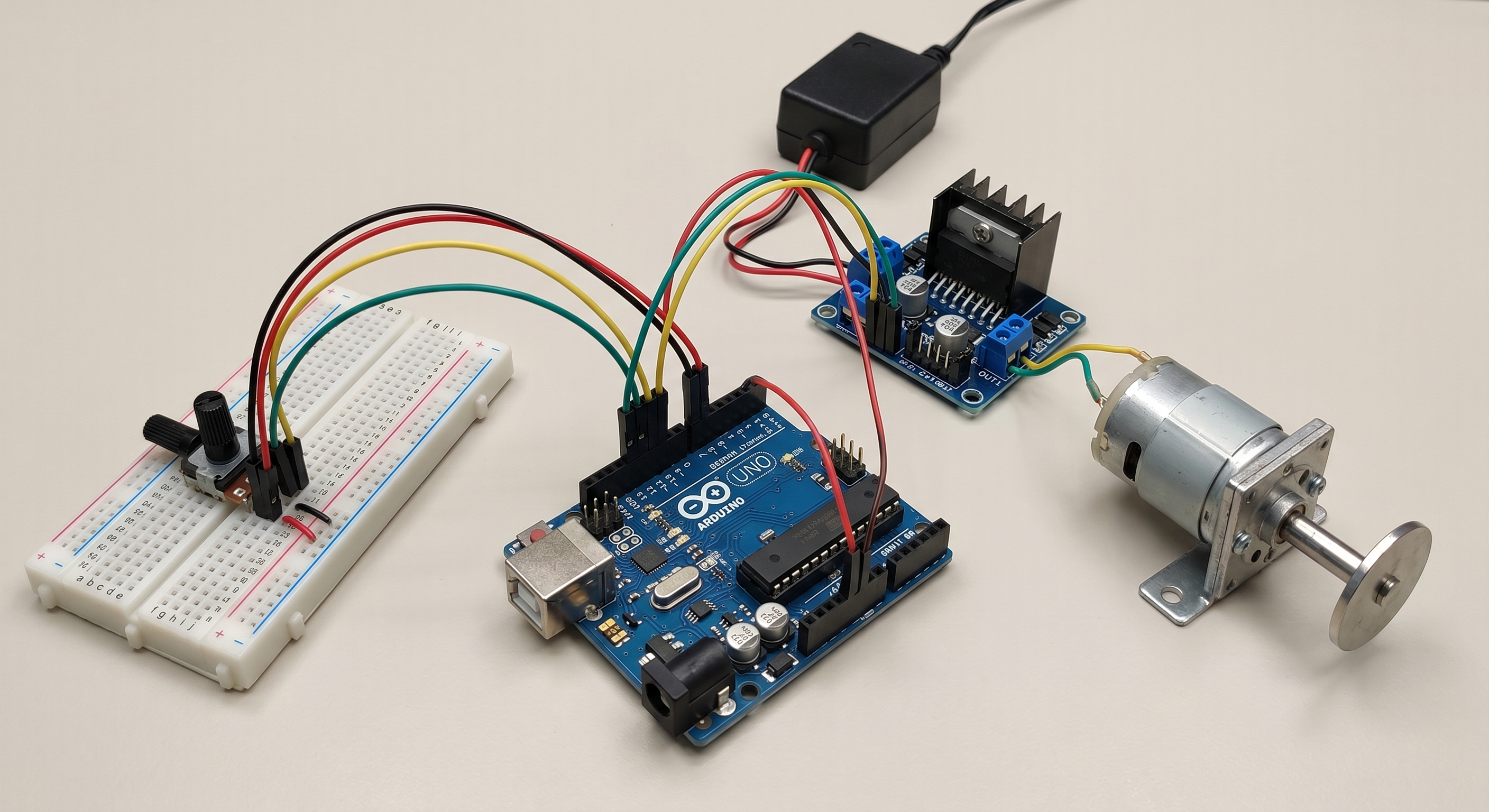
[IMAGE 1] — Maquette expérimentale : moteur DC, driver L298N, potentiomètre, Arduino Uno — Fichier : Image_20260601_130543.png
3
Objectif de l'étude
1
Établir la fonction de transfert du moteur DC
2
Synthétiser un correcteur PID par la méthode de Ziegler-Nichols puis optimisation
3
Simuler la réponse indicielle sous Python (intégration temporelle)
4
Implémenter le correcteur PID sur Arduino Uno
5
Confronter les résultats de simulation et d'expérience
Fil conducteur : de la modélisation à la validation expérimentale
4
Problématique
Système : articulation motorisée 1 DDL
Entrée : consigne angulaire θ_c
Sortie : position angulaire θ(t)
Critères : rapidité, précision, stabilité
5
Positionnements thématiques
1. Automatique
Asservissement en position
Correcteur PID (synthèse, réglage)
Stabilité, précision, rapidité
Critère de Routh
2. Génie électrique
Moteur à courant continu
Modèle électrique (loi des mailles)
Driver L298N, PWM
Arduino Uno (microcontrôleur)
3. Génie mécanique
Théorème du moment dynamique
Frottements visqueux
Moment d'inertie J
Articulation 1 degré de liberté
6
Démarche scientifique
Modélisation physique
Lois électriques et mécaniques
Synthèse du correcteur
Méthode Ziegler-Nichols + optimisation
Simulation numérique
Python, intégration temporelle
Implémentation
Arduino Uno, boucle temps réel
Confrontation
Écarts modèle / expérience
Cycle itératif : toute divergence entre simulation et expérience alimente une révision du modèle
7
Présentation du système physique
Moteur DC 12 V : actionneur rotatif (1 DDL)
Driver L298N : amplificateur de puissance (PWM)
Potentiomètre 10 kΩ : capteur de position angulaire
Arduino Uno : calculateur temps réel (f_éch = 100 Hz)
Alimentation stabilisée 12 V / 2 A
Composant
Rôle
Moteur DC
Actionneur rotatif
Driver L298N
Amplificateur de puissance
Potentiomètre
Capteur de position angulaire
Arduino Uno
Calculateur temps réel
[IMAGE 1] — Maquette expérimentale : moteur DC, driver L298N, potentiomètre, Arduino Uno — Fichier : Image_20260601_130543.png
8
PARTIE B — MODÉLISATION
Hypothèses de modélisation
Corps rigide : pas de déformation de l'arbre moteur
Inductance L négligée : régime électrique quasi-statique (L/R ≈ 0)
Frottements visqueux uniquement : modèle linéaire f·ω (Coulomb négligé en première approche)
Alimentation idéale : tension d'entrée u(t) = signal de commande
Capteur parfait : pas de retard ni de bruit (première approche)
Ces hypothèses simplifient le modèle et permettent d'obtenir une fonction de transfert linéaire. Les effets non modélisés seront discutés lors de la confrontation expérimentale.
9
PARTIE B — MODÉLISATION
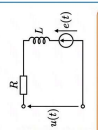
Équation électrique du moteur
u(t) = R·i(t) + L·di/dt + e(t)
e(t) = Ke·ω(t)
u(t) = R·i(t) + Ke·ω(t)
i(t) = [u(t) − Ke·ω(t)] / R
Cm(t) = Km·i(t)
R = 2,5 Ω
Km = 0,02 N·m/A
Ke = 0,02 V·s/rad
[IMAGE 3] — Modèle électrique du moteur à courant continu — Fichier : Capture d'écran 2026-06-01 133100.png
10
PARTIE B — MODÉLISATION
Équation mécanique du moteur
Théorème du moment dynamique : J·dω/dt = Cm(t) − f·ω(t)
Intégration pour la position : dθ/dt = ω(t)
Couple moteur : Cm(t) = Km·i(t)
Substitution : J·dω/dt = Km·i(t) − f·ω(t)
Paramètres : J = 0,001 kg·m² | f = 0,01 N·m·s/rad
Système d'état :
J·θ̈(t) + f·θ̇(t) = Km·i(t)
u(t) = R·i(t) + Ke·θ̇(t)
Sortie : θ(t) — Position angulaire (rad)
Ces deux équations (électrique + mécanique) constituent le modèle d'état du système.
11
PARTIE B — MODÉLISATION
Fonction de transfert en boucle ouverte
Application de la transformée de Laplace (avec L ≈ 0)
Élimination de i(p) entre les deux équations
Sortie : Θ(p) — position angulaire
H(p) = Θ(p)/U(p) = Km / (R · p · (J·p + f + Km·Ke/R))
H(p) = K / [p · (τ·p + 1)]
K = Km/(f·R + Km·Ke) = 0,02/(0,01×2,5 + 0,02×0,02) = 0,784 rad/V
τ = J·R/(f·R + Km·Ke) = 0,001×2,5/0,0254 ≈ 0,098 s
Système de type 1 (intégrateur pur en p)
Pôles : p = 0 et p = −(f·R + Km·Ke)/(J·R) ≈ −10,2 rad/s
12
PARTIE B — MODÉLISATION
Identification des paramètres
Gain statique : K = Km/(f·R + Km·Ke) ≈ 0,784 rad/V·s
Constante de temps mécanique : τ ≈ 0,098 s
Ces paramètres sont utilisés dans toute la simulation Python
13
PARTIE B — MODÉLISATION
Frottements secs : modèle de Coulomb
<strong>Modèle de Coulomb :</strong> Cf = Cf<sub>0</sub> · sign(ω)
<strong>Non linéaire :</strong> non pris en compte dans le modèle linéaire initial
<strong>Effet principal :</strong> zone morte (dead-zone) autour de ω = 0
<strong>Conséquence :</strong> erreur statique résiduelle en expérience
<strong>Compensation possible :</strong> terme de compensation feedforward
En première approche, seuls les frottements visqueux f·ω sont modélisés → erreur statique nulle en simulation mais résiduelle en expérience (0,002 rad)
Frottement total :
Cf_total = f·ω + Cf<sub>0</sub>·sign(ω)
14
PARTIE B — MODÉLISATION
Modèle final retenu
Fonction de transfert en boucle ouverte
H(p) = 0,784 / [p · (0,098·p + 1)]
Gain K = 0,784 rad/V·s
K = Km / (f·R + Km·Ke)
Constante τ = 0,098 s
τ = J·R / (f·R + Km·Ke)
Type 1 (intégrateur)
→ erreur statique nulle (théorique)
Système linéaire, continu, monovariable
Hypothèses : L ≈ 0, frottements visqueux uniquement
Validé par les simulations Python
15
PARTIE B — MODÉLISATION
Stabilité en boucle ouverte
Pôles de H(p) : p₁ = 0 et p₂ = −(f·R + K<sub>m</sub>·K<sub>e</sub>)/(J·R) ≈ −10,2 rad/s
p₁ = 0 : pôle sur l'axe imaginaire → système marginalement stable en boucle ouverte
p₂ < 0 : pôle à partie réelle négative → stable
Réponse indicielle en boucle ouverte : rampe (diverge vers +∞)
Nécessité d'un correcteur pour garantir la stabilité en boucle fermée
⚠ Un système de type 1 en boucle ouverte est marginalement stable : l'intégrateur garantit l'annulation de l'erreur statique mais impose une conception soigneuse du correcteur.
Correcteur PID : introduit un zéro pour déplacer les pôles vers la gauche
Critère de Routh appliqué en boucle fermée (cf. diapositive 24)
16
PARTIE C — SYNTHÈSE DU CORRECTEUR PID
Structure du correcteur PID
Domaine temporel
u(t) = Kp·e(t) + Ki·∫e(t)dt + Kd·de(t)/dt
Transformée de Laplace
C(p) = Kp + Ki/p + Kd·p
e(t) = θc(t) − θ(t) : erreur de position
Kp : gain proportionnel — action immédiate
Ki : gain intégral — annule l'erreur statique
Kd : gain dérivé — anticipe les variations
Gains finaux optimisés : Kp = 1,00 | Ki = 0,01 | Kd = 0,0255
17
PARTIE C — SYNTHÈSE DU CORRECTEUR PID
Rôle de chaque action PID
Action
Formule
Effet principal
Risque si trop grand
P
Kp·e(t)
Réduction de l'erreur, rapidité
Dépassement, oscillations
I
Ki·∫e dt
Annulation erreur statique
Saturation (windup), lenteur
D
Kd·de/dt
Amortissement, anticipation
Amplification du bruit
P seul : erreur statique résiduelle
PI : erreur nulle mais risque de dépassement
PID : compromis rapidité/stabilité/précision
Gains optimaux : Kp = 1,00 | Ki = 0,01 | Kd = 0,0255
Réglage itératif nécessaire pour respecter le cahier des charges
18
PARTIE C — SYNTHÈSE DU CORRECTEUR PID
Cahier des charges du correcteur
D%
Dépassement
D% < 5 %
Éviter les à-coups mécaniques sur l'articulation
tr
Temps de réponse à 5%
tr5% < 0,5 s
Assurer une réponse rapide aux changements de consigne
ε
Erreur statique
ε∞ = 0 rad
Positionnement précis : atteindre exactement la consigne angulaire
19
PARTIE C — SYNTHÈSE DU CORRECTEUR PID
Méthode de Ziegler-Nichols (boucle fermée)
Méthode empirique de réglage en boucle fermée
Étape 1 : désactiver l'action I et D (Ki = 0, Kd = 0)
Étape 2 : augmenter Kp jusqu'aux oscillations entretenues → Kp = Kcrit
Étape 3 : mesurer la période des oscillations → Tcrit
Étape 4 : calculer les gains selon le tableau de Ziegler-Nichols
Correcteur
Kp
Ti
Td
P
0,5·Kcrit
—
—
PI
0,45·Kcrit
Tcrit/1,2
—
PID
0,6·Kcrit
Tcrit/2
Tcrit/8
ne nécessite pas de modèle mathématique précis
gains initiaux souvent sous-optimaux → nécessite une optimisation
20
PARTIE C — SYNTHÈSE DU CORRECTEUR PID
Détermination de K_crit et T_crit par simulation
Simulation Python en boucle fermée avec correcteur P pur
Augmentation progressive de Kp (pas de 0,05) jusqu'aux oscillations entretenues
Oscillations détectées pour Kp ≈ Kcrit = 0,40
Période mesurée sur la courbe simulée : Tcrit ≈ 0,314 s
K_crit = 0,40 T_crit = 0,314 s
Déterminés par simulation Python (boucle P pur + analyse de la réponse)
Application des formules PID de Ziegler-Nichols :
Kp = 0,6 × 0,40 = 0,24
Ki = Kp / (Tcrit/2) = 0,24 / 0,157 ≈ 0,96
Kd = Kp × (Tcrit/8) = 0,24 × 0,039 ≈ 0,015
Ces gains initiaux seront ensuite optimisés
(Courbe d'oscillation critique — texte seulement, pas d'image sur cette diapositive)
21
PARTIE C — SYNTHÈSE DU CORRECTEUR PID
Gains calculés par Ziegler-Nichols
Kp (Proportionnel)
0,24
0,6 × Kcrit = 0,6 × 0,40
Gain de base, réduction de l'erreur
Ki (Intégral)
0,96
Kp / (Tcrit/2) = 0,24 / 0,157
Annulation de l'erreur statique
Kd (Dérivé)
0,015
Kp × (Tcrit/8) = 0,24 × 0,039
Amortissement des oscillations
⚠ Résultat : dépassement = 37,73 % → trop élevé. Une optimisation automatique est nécessaire.
22
PARTIE C — SYNTHÈSE DU CORRECTEUR PID
Optimisation automatique des gains
Méthode : descente de gradient sur la fonction coût J = D%² + (tr/0,5)² + ε²
Point de départ : gains Ziegler-Nichols (Kp=0,24, Ki=0,96, Kd=0,015)
Convergence après ~200 itérations
Critère d'arrêt : D% < 5% et tr < 0,5s et ε = 0
Gain
ZN initial
Optimisé
Cahier des charges respecté en simulation après optimisation
23
PARTIE C — SYNTHÈSE DU CORRECTEUR PID
Vérification de stabilité : critère de Routh
Polynôme caractéristique en boucle fermée avec PID :
P(p) = J·R·p³ + (f·R + Km·Ke + Kd·Km)·p² + (Km·Kp)·p + Km·Ki
Application numérique avec gains optimisés :
P(p) = 0,0025·p³ + (0,0254 + 0,02×0,0255)·p² + 0,02·p + 0,02×0,01
P(p) ≈ 0,0025·p³ + 0,02591·p² + 0,02·p + 0,0002
Tableau de Routh :
b₁ = (0,02591×0,02 − 0,0025×0,0002)/0,02591 ≈ 0,01998 > 0
0,0002 > 0
Tous les coefficients de la première colonne sont positifs
✓ Système stable en boucle fermée (critère de Routh-Hurwitz satisfait)
Pôles à partie réelle strictement négative
24
PARTIE D — SIMULATION NUMÉRIQUE
Outil de simulation : Python
Langage : Python 3 (bibliothèques : NumPy, Matplotlib)
Méthode : intégration temporelle par différences finies (Euler explicite)
Pas de temps : Δt = 1 ms (1000 points par seconde)
Durée de simulation : 2 s (réponse indicielle à échelon unitaire)
Modèle utilisé : H(p) = 0,784 / [p·(0,098·p + 1)] avec correcteur PID
# Boucle principale de simulation for k in range(N): erreur = consigne - theta[k] integrale += Ki * erreur * dt derivee = (erreur - erreur_prec) / dt u = Kp*erreur + integrale + Kd*derivee omega_dot = (Km*((u - Ke*omega[k])/R) - f*omega[k]) / J omega[k+1] = omega[k] + omega_dot * dt theta[k+1] = theta[k] + omega[k] * dt
25
PARTIE D — SIMULATION NUMÉRIQUE
Discrétisation et implémentation de la boucle
Discrétisation Euler explicite (ordre 1) : x[k+1] = x[k] + Δt·f(x[k])
Action intégrale : I[k] = I[k-1] + K<sub>i</sub>·e[k]·Δt
Action dérivée : D[k] = K<sub>d</sub>·(e[k] − e[k-1])/Δt
Commande : u[k] = K<sub>p</sub>·e[k] + I[k] + D[k]
Saturation de la commande : u ∈ [−12 V, +12 V]
Consigne θ<sub>c</sub>
Calcul erreur e[k] = θ<sub>c</sub> − θ[k]
PID numérique → u[k]
Modèle moteur → ω[k+1], θ[k+1]
Mesure θ[k+1] → boucle suivante
26
PARTIE D — SIMULATION NUMÉRIQUE
Résultat simulé : réponse indicielle
Consigne : échelon unité θc = 1 rad
Gains : Kp = 1,00 | Ki = 0,01 | Kd = 0,0255
Dépassement : 4,93 % ✓ (< 5%)
Temps de réponse à 5% : 0,062 s ✓ (< 0,5 s)
Erreur statique : 0 rad ✓
✓ Cahier des charges respecté en simulation
[IMAGE 4] — Réponse indicielle simulée (PID optimal) : dépassement 4,93% — Fichiers : Capture d'écran 2026-06-01 124446.png (valeurs) + Capture d'écran 2026-06-01 124508.png (courbe)
27
PARTIE D — SIMULATION NUMÉRIQUE
Simulation avec perturbation (couple résistant)
<strong>Perturbation simulée :</strong> couple résistant C<sub>r</sub> = 0,02 N·m appliqué à t = 0,5 s
<strong>Effet visible :</strong> déviation temporaire de la position angulaire
<strong>Rôle de l'action intégrale :</strong> accumulation de l'erreur → retour à la consigne
<strong>Temps de retour à ±5% de la consigne :</strong> < 0,1 s après perturbation
<strong>Erreur statique nulle</strong> maintenue grâce à l'intégrateur
Rôle de l'action intégrale :
En présence d'une perturbation constante, seul le terme intégral peut annuler l'erreur en régime permanent. L'action P seule laisserait une erreur résiduelle.
Résultat : robustesse du correcteur PID face aux perturbations constantes — validée en simulation
28
- robotique
- tipe
- pid-controller
- arduino
- python-simulation
- moteur-dc
- automatique