
Modélisation Électromécanique du Servomoteur SG90
Apprenez la modélisation complète du servomoteur SG90 : loi des mailles, théorème du moment dynamique et fonction de transfert en s pour bras robotique.
2.1
Modèle électrique : loi des mailles
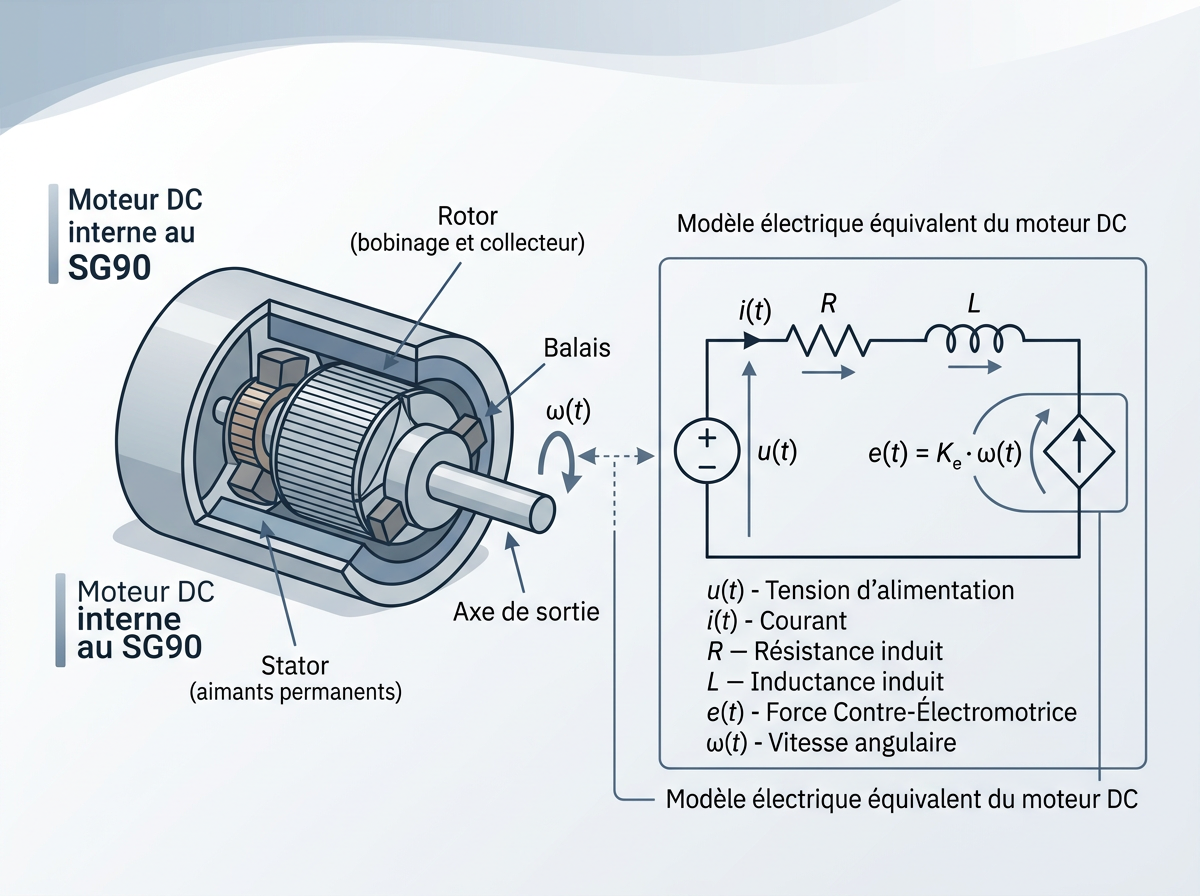
Modélisation du moteur DC interne au servomoteur SG90
🔌 Contexte
Le servomoteur SG90 contient un moteur à courant continu (DC) en son cœur
C'est ce moteur DC que nous modélisons ici
L'électronique interne et le réducteur (inertie, frottements) seront pris en compte plus tard
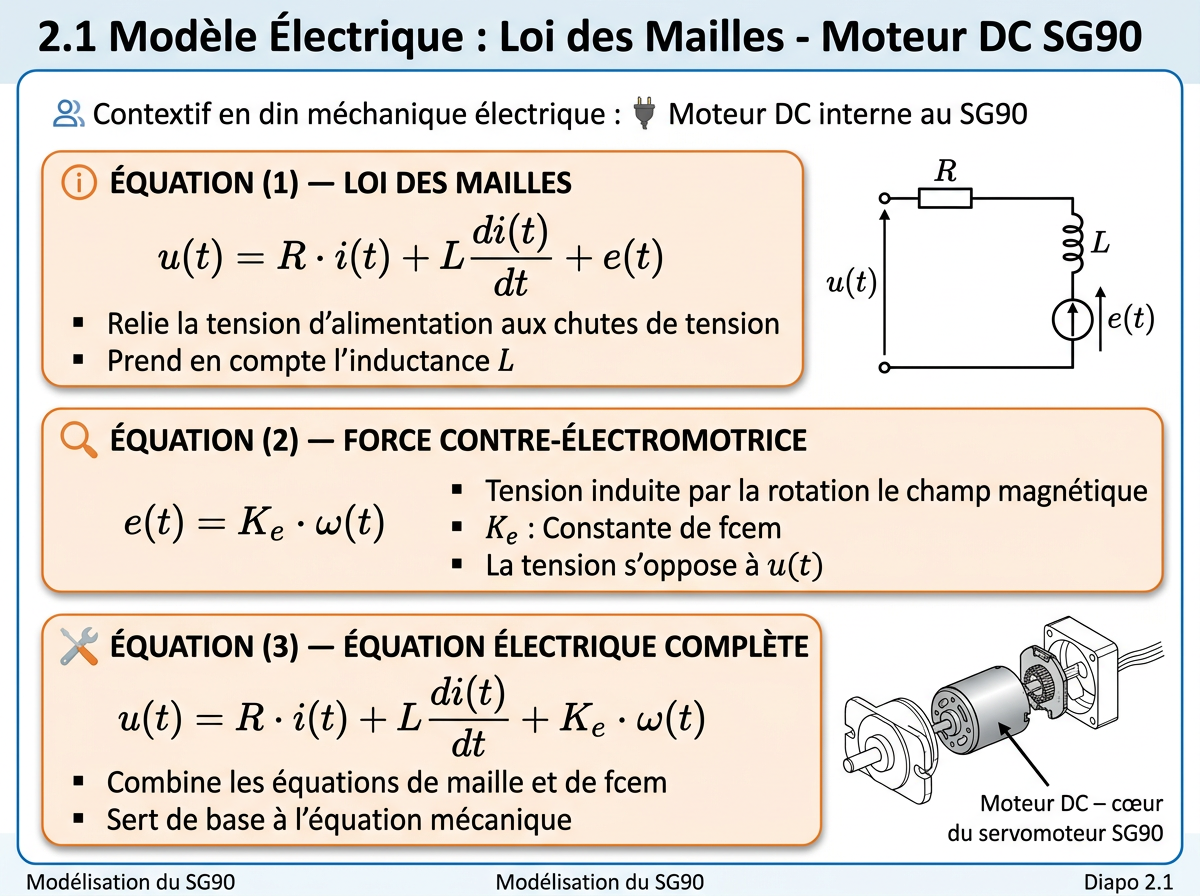
Équation (1) — Loi des mailles
Relie la tension d'alimentation u(t) aux chutes de tension dans la résistance R, l'inductance L et la force contre-électromotrice e(t)
L'inductance L n'est PAS négligée ici ; son effet sera discuté dans le couplage électromécanique (diapo 2.3)
Équation (2) — Force contre-électromotrice
Le rotor tourne dans le champ magnétique statorique
Par la loi de Faraday, une tension induite e(t) apparaît, proportionnelle à la vitesse ω(t)
La constante Kₑ dépend de la construction du moteur (flux, nombre de spires)
Cette tension s'oppose à u(t) et limite naturellement le courant et la vitesse
Équation (3) — Équation électrique complète
Combinaison de l'équation (1) et de l'équation (2)
Sera utilisée ultérieurement pour éliminer le courant i(t) et obtenir l'équation mécanique
Moteur DC – cœur du servomoteur SG90
Modélisation du SG90
Diapo 2.1
2.2
Modèle mécanique : théorème du moment dynamique
Dynamique en rotation du bras robotique — moteur DC SG90
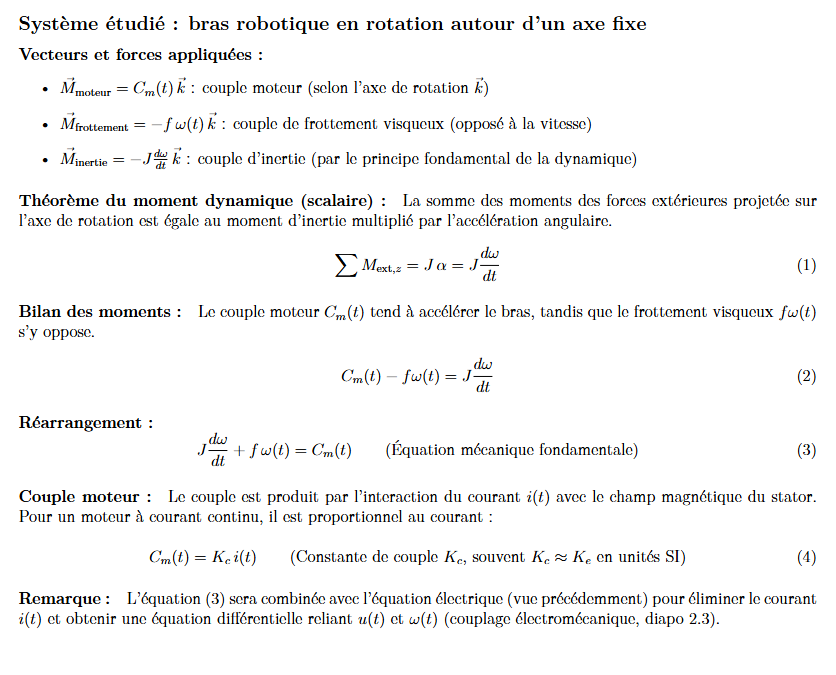
Le système étudié est un bras robotique en rotation autour d'un axe fixe. L'image ci-dessous détaille l'application du théorème du moment dynamique au rotor, en introduisant les couples moteur Cₕ(t), de frottement visqueux f·ω(t) et d'inertie J·dω/dt, pour aboutir à l'équation mécanique fondamentale.
Développement complet — Théorème du moment dynamique (éqs. 1 à 4)
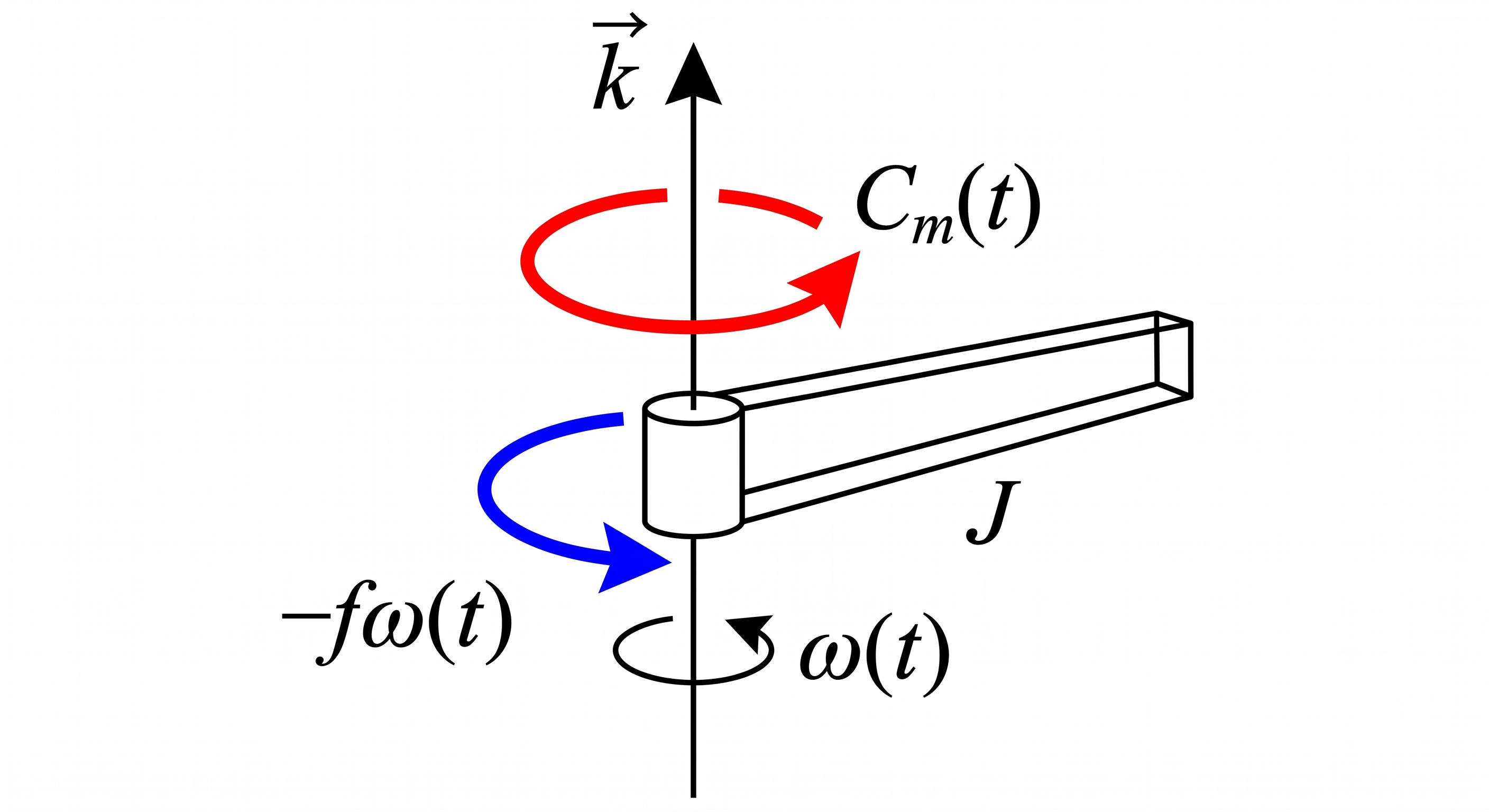
Bras robotique en rotation — couples et vecteur k⃗
⚙️ Rappel des grandeurs
J : moment d'inertie du bras (kg·m²) — f : coefficient de frottement visqueux (N·m·s) — Cₕ(t) = Kₒ·i(t) : couple moteur proportionnel au courant — ω(t) : vitesse angulaire (rad/s)
Modélisation du SG90
Diapo 2.2
2.3
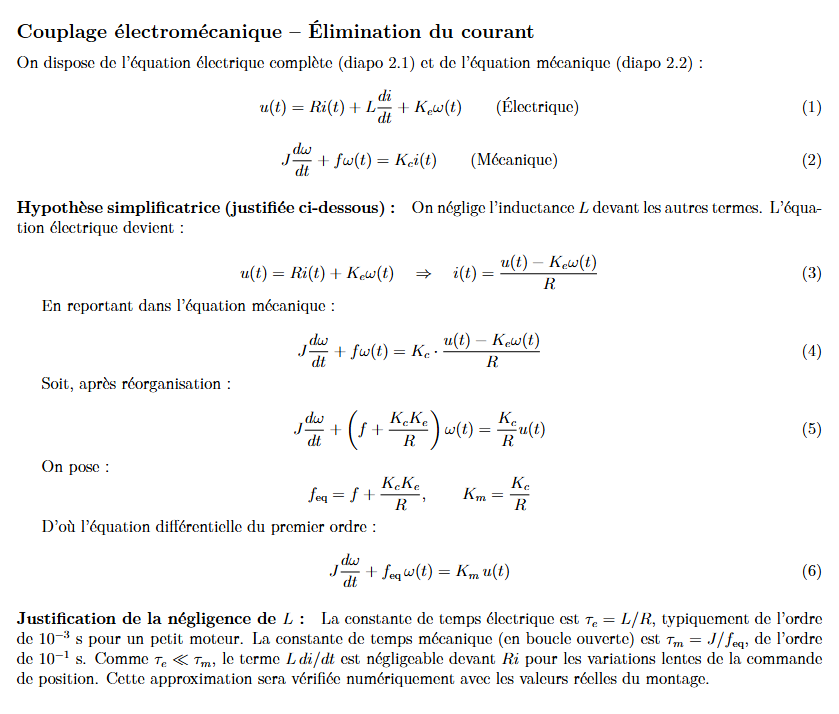
Couplage électromécanique – Élimination du courant
Combinaison des équations électrique et mécanique — Hypothèse τ_e ≪ τ_m
En combinant l'équation électrique (diapo 2.1) et l'équation mécanique (diapo 2.2), on élimine le courant i(t) pour obtenir une équation différentielle du premier ordre en ω(t). L'inductance L est négligée au motif que la constante de temps électrique τ_e = L/R (de l'ordre de 10⁻³ s) est très petite devant la constante de temps mécanique τ_m = J/f_eq (de l'ordre de 10⁻¹ s) ; cette approximation sera vérifiée numériquement avec les valeurs réelles du montage. L'équation différentielle ainsi obtenue — premier ordre en ω — servira de base pour l'établissement de la fonction de transfert en diapo suivante.
Développement complet — Couplage électromécanique et élimination de i(t) (éqs. 1 à 6)
⚡ Justification de la négligence de L
τ_e = L/R ≈ 10⁻³ s (constante électrique, très rapide) τ_m = J/f_eq ≈ 10⁻¹ s (constante mécanique, 100× plus lente) Comme τ_e ≪ τ_m, le terme L·di/dt est négligeable devant R·i(t). → Vérification numérique prévue avec les valeurs du montage.
Modélisation du SG90
Diapo 2.3
2.4
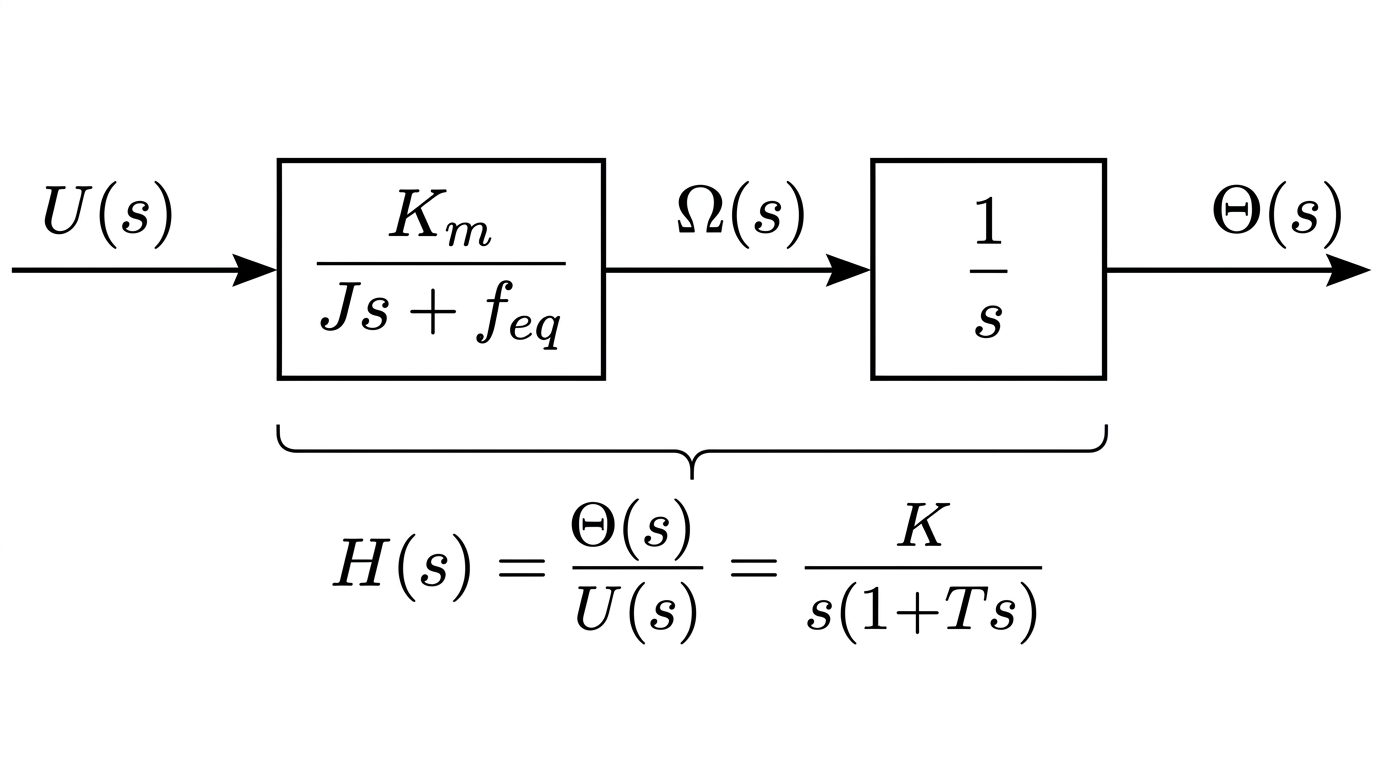
Transformée de Laplace et fonction de transfert
Du domaine temporel au domaine fréquentiel — Forme canonique H(s) = K / s(1+Ts)
L'équation différentielle obtenue au terme du couplage électromécanique (diapo 2.3) est exprimée dans le domaine temporel, ce qui rend difficile l'analyse directe du système. La transformée de Laplace résout ce problème en convertissant la dérivation en multiplication par s, transformant ainsi l'équation différentielle en une simple équation algébrique dans le domaine fréquentiel. Le document ci-contre détaille ce passage et aboutit à la forme canonique H(s) = K / s(1+Ts), où l'intégrateur 1/s traduit l'intégration vitesse → position, et le premier ordre 1/(1+Ts) modélise l'inertie et les frottements. Cette fonction de transfert servira de base à la synthèse du correcteur PID (session 3).
Développement complet — Transformée de Laplace, application au système et forme canonique H(s)
Modélisation du SG90
Diapo 2.4
- servomoteur-sg90
- robotique
- systèmes-linéaires
- moteur-dc
- automatique
- physique-appliquée
- modélisation