





Meerkat Cooperative Care: Communication and Coordination
Explore how meerkats use acoustic and spatial cues to coordinate babysitting and cooperative breeding in the Kalahari Desert using biologging data.
Coordination and Communication of Cooperative Offspring Care Behaviour (Babysitting) in Meerkats
Suricata suricatta · Kalahari Desert
Presenter Name
International Ethology Conference · 2026
Talk Overview
Background & Study System
Research Questions
Methods — Biologging & Playbacks
Key Results
Discussion & Implications
Conclusions
Section 1
Background & Study System
Why do meerkats cooperate — and how do they communicate?
Cooperative Breeding in Meerkats
Meerkats live in groups of 2–30 individuals
Only dominant pair reproduces; helpers assist with pup care
Babysitting = staying at the burrow to guard pups while others forage
Raises pup survival — a cooperative fitness benefit
Cooperation depends on effective information flow within social units.
The Babysitting Behaviour — What We Know
Who babysits?
Subordinate helpers — males and females — take turns guarding pups at the burrow.
When?
While the rest of the group forages, one individual stays behind — a significant personal cost.
The Puzzle
How is the decision to babysit coordinated? What role does communication play?
The coordination mechanism behind babysitting remains poorly understood.
Section 2
Research Questions
Research Questions
What acoustic, visual and spatial cues do babysitters produce?
Analysing multi-modal signals during babysitting periods
How do foraging individuals respond to babysitter vocalisations?
Playback experiments measuring vigilance, movement & return probability
How does individual behaviour translate into group-level babysitting patterns?
Linking individual signals to collective coordination
Goal: Understand how communication supports stable cooperation in meerkat societies.
Section 3
Methods
Biologging & Playback Experiments
Full-group collaring with audio, GPS & accelerometers + controlled playback trials
Biologging — Full-Group Collaring
Audio recorder
GPS receiver
Accelerometer
Collars deployed on <strong style='font-weight: 600;'>ALL</strong> individuals across multiple meerkat groups
Simultaneous data capture from babysitters <strong style='font-weight: 600;'>AND</strong> non-babysitters
Records all vocalisations during babysitting periods
Tracks movement, location, and activity continuously
First study to apply full-group multi-modal biologging to cooperative care coordination
Playback Experiments
Playback stimulus delivered
Foraging group away from burrow
Acoustic cue from supposed babysitter
Vigilance response
Movement decisions
Return probability
Vocalisations from known babysitters vs. control sounds.
Multiple trials across groups.
Responses measured with GPS tracking + direct observation.
SECTION 4
Key Results
Acoustic Signal Processing Data · Kalahari Meerkat Project
Result 1: Vocal Cues Drive Behavioural Responses
Fig. 1 — Playback response comparison
Vigilance increase (%)
Movement towards burrow (%)
Return probability (%)
Control sounds
Babysitter calls
Babysitter calls significantly increased vigilance in foraging individuals
Foragers moved towards the burrow more often in response to babysitter calls
Return probability was significantly higher after babysitter vocalisations
Vocal cues from the babysitter actively coordinate group behaviour
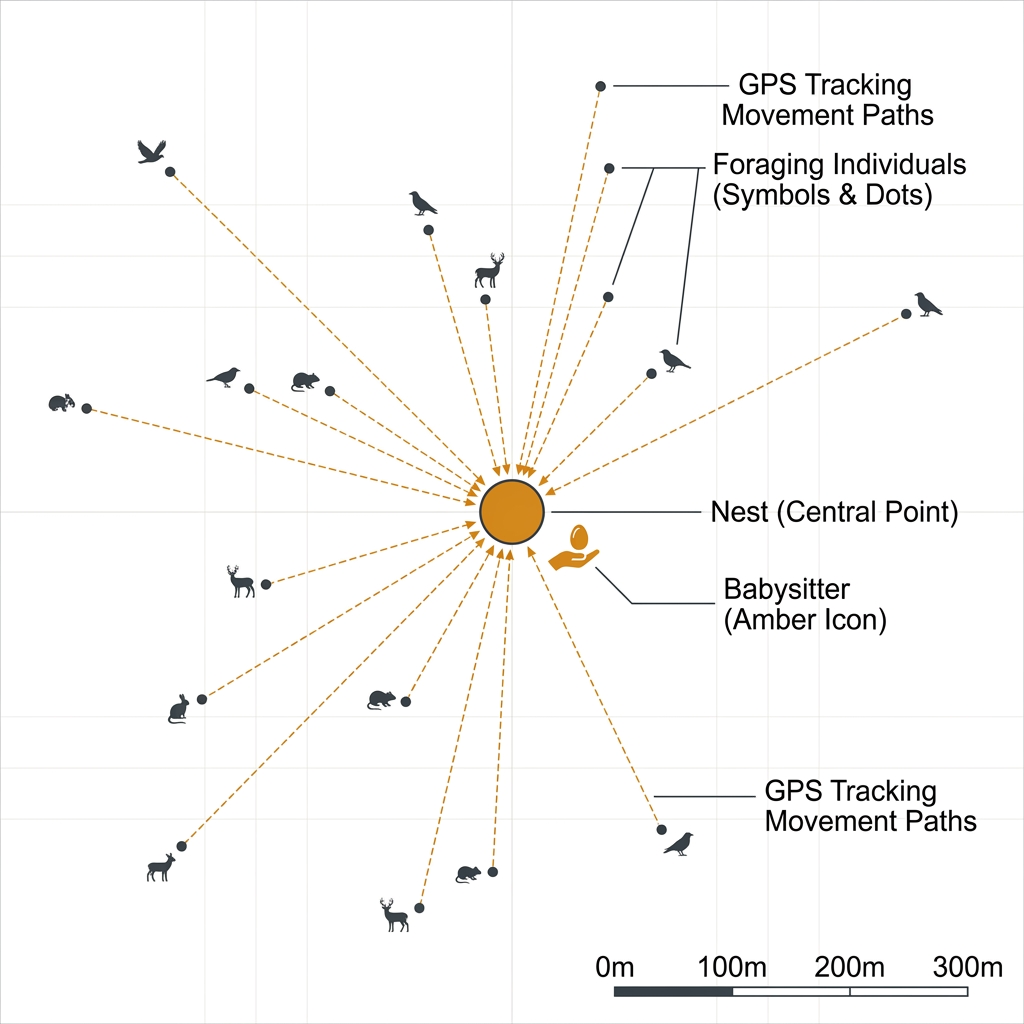
Result 2: Spatial & Visual Cues Shape Group-Level Patterns
Fig. 2 — GPS tracking: group movement toward burrow during babysitting
Spatial proximity of the babysitter to the burrow predicts group movement decisions
Visual contact with the babysitter increases helper coordination
Combined acoustic + spatial information leads to strongest behavioural response
Multimodal cues — acoustic + visual + spatial — work together to coordinate behaviour
Result 3: Individual Signals → Group-Level Coordination
Individual Babysitter
Vocalisations + Spatial Signals
Each Foraging Individual
Adjusted vigilance, movement, return timing
Emergent Collective Pattern
Coordinated babysitting shifts — stable cooperative care
Information flows from individual to group — communication scaffolds cooperation
Babysitter vocalisation rate correlates with group cohesion
Acoustic signals spread coordination without direct instruction
Social information drives emergent collective scheduling
SECTION 5
Discussion & Implications
What do these findings tell us about the evolution of cooperation?
Discussion: Communication Supports Stable Cooperation
Multimodal Communication
Meerkats integrate acoustic, visual, and spatial cues — a multimodal communication system that provides more robust coordination than any single channel alone.
Individual Costs, Collective Benefits
Babysitters incur real foraging costs. Effective communication may reduce the coordination burden, sustaining the behaviour over evolutionary time.
Broader Implications for Cooperative Breeding
These findings extend beyond meerkats — they suggest that communication systems may have co-evolved with cooperative breeding across vertebrates.
Information Flow & Sociality
Effective information flow within social units is a prerequisite for maintaining cooperation — supporting theoretical predictions from social evolution models.
Broader Evolutionary Context
Communication-mediated cooperation appears across phylogenetically diverse taxa
Acoustic signalling from helpers may be a convergent solution to coordination problems
Meerkats offer an ideal model system for studying communication-cooperation links
Understanding meerkats helps us understand the evolution of sociality more broadly.
Pup-provisioning calls & sentinel signals
Turn-taking & distributed vigilance
High offspring survival & foraging rate
Alarm calls & allofeeding signals
Hierarchical helper provisioning
Enhanced group predator defense
Complex trills & incubation calls
Multi-male shared nest defense
Brood parasitism rejection
Vocal mobbing cues & sentinel calls
Overlapping allocare & vigilance
Long-term territory retention
SECTION 6
Conclusions
What have we learned about how meerkats — and animals in general — coordinate cooperation?
Conclusions
Babysitter vocalisations are powerful coordination signals
they elicit strong, measurable behavioural responses in foraging group members.
Multiple signal types work together
acoustic, visual, and spatial cues are integrated by foragers to make decisions.
Individual-level signals scale to group-level patterns
communication scaffolds emergent collective cooperation.
Communication is key to sustaining cooperative breeding
it reduces coordination costs and supports stable alloparental behaviour.
Meerkats provide a model system
insights here apply to understanding how communication shapes sociality across species.
Data from full-group biologging + playback experiments across multiple meerkat groups, Kalahari.
Thank You
Acknowledgements
Kalahari Meerkat Project
European Research Council
Dr. J. Smith, Dr. A. Doe
University of Cambridge
Questions?
name@institution.ac.uk
- meerkats
- animal-behavior
- ethology
- cooperative-breeding
- biologging
- kalahari-desert
- science
- ecology