

השוואת שיטות עירור במנועי זרם ישר: סיכום ניסוי הנדסי
ניתוח והשוואה של שיטות עירור במנועי DC: טורי, מקבילי, מרוכב ונפרד. כולל תוצאות ניסוי, אופייני מהירות-מומנט וחישובי נצילות.
מנוע זרם ישר (DC) – אפיון והשוואת שיטות עירור
מעבדת מכונות 1 | אוניברסיטת בן־גוריון בנגב
קבוצה 13: טל טולדו משגב | עומר אייבי | מנחה: דניאל כץ תאריך: 16/11/2025 | הגשה: 11/1/2026
מבוא קצר – מוטיבציה ושימושים
• מנוע זרם ישר: המרת אנרגיה חשמלית לעבודה מכאנית • שימוש נרחב בתעשייה – גמישות בדרישות מומנט ומהירות • חידושים: חומרים מגנטיים מתקדמים, ניהול תרמי ובקרה אלקטרונית • חשיבות: שיטת העירור קובעת את אופיין הפעולה המדויק
מטרות הניסוי
מדידת אופייני מנוע DC והבנת הקשר בין נצילות, מומנט ומהירות
השוואה מעשית בין שיטות עירור: מקבילי, טורי, מרוכב ונפרד
הסקת מסקנות הנדסיות להתאמת סוג העירור ליישום הספציפי
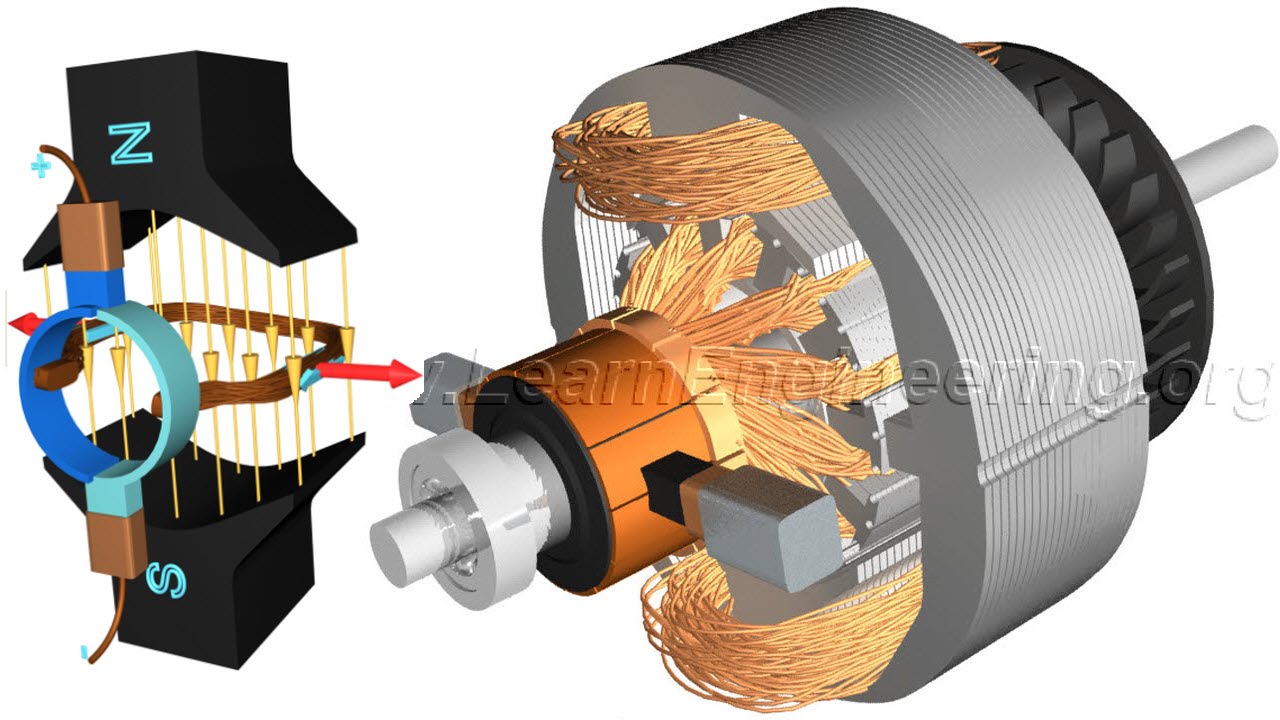
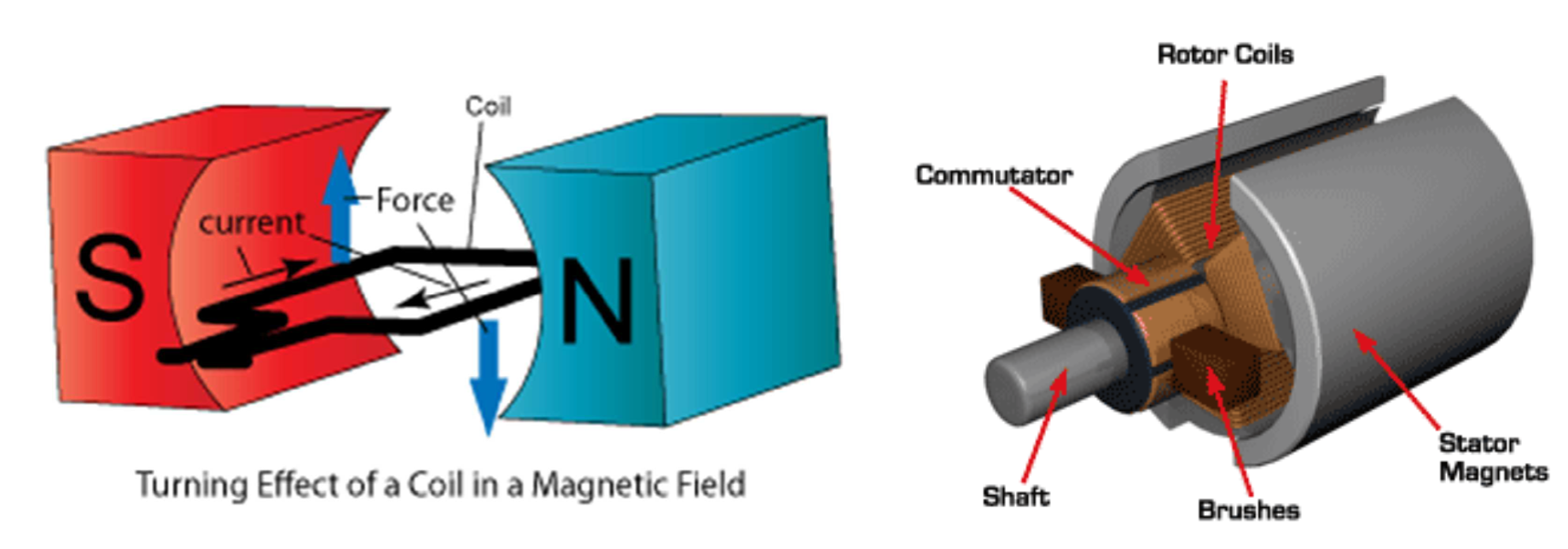
רקע תיאורטי – הפיזיקה של המערכת
כוח לורנץ: יצירת מומנט ע"י שדה מגנטי על מוליך נושא זרם.
מבנה: סלילי השדה (סטטור) יוצרים שטף, סלילי העוגן (רוטור) חווים כוח.
כא"מ מושרה (Back-EMF): מתח נגדי המתפתח כתלות במהירות, מווסת את הזרם במצב מתמיד.
משוואות יסוד לניתוח התוצאות
T = k · Φ · Ia
מומנט כתלות בשטף וזרם
Ea = k · Φ · ω
כא"מ מושרה כתלות בשטף ומהירות
Pin = Va · Ia + Vf · If
הספק כניסה חשמלי כולל
Pout = T · ω
הספק יציאה מכאני
η = (Pout / Pin) · 100%
נצילות המערכת
מערכת הניסוי
בדיקה בכל 4 התצורות תוך שינוי עומס (Torque):
• נמדד: מתח (V), זרם עוגן/שדה (I), מהירות (RPM), מומנט (Nm) • מחושב: הספק כניסה/יציאה ונצילות (Efficiency) • בוצע: ניסוי התנעה רגעית (Transient Start) בעירור מקבילי
תוצאות: עירור מקבילי (Shunt)
• קשר ליניארי בין זרם למומנט. • מהירות כמעט קבועה (ירידה קלה עם העומס). • נצילות מירבית סביב העומס הנומינלי.
התנעה רגעית בעירור מקבילי
זרם התנעה גבוה (Spike) עקב היעדר Back-EMF ברגע t=0. עם עליית המהירות, הזרם דועך לערך היציב.
תוצאות: עירור טורי (Series)
• מומנט האצה גבוה בזרמים גבוהים. • רגישות גבוהה לעומס: "בריחת" מהירות בעומס נמוך. • קשר היפרבולי בין מהירות למומנט.
השוואה: מרוכב (Compound) מול נפרד (Separately Excited)
עירור מרוכב:
שילוב תכונות. מונע התבדרות מהירות (לעומת טורי) אך שומר על מומנט גבוה.
עירור נפרד:
שליטה מלאה ובלתי תלויה. התנהגות דומה למקבילי (ליניארית).
ניתוח שגיאות
<table style='width:100%; border-collapse: collapse; font-size: 26px; text-align: center;'><tr style='background: #002855; color: white;'><th>ערך נמדד</th><th>מכשיר מדידה</th><th>שגיאה אופיינית</th></tr><tr style='background: #fff; border-bottom: 1px solid #ccc;'><td style='padding: 15px;'>מתח (V)</td><td>וולטמטר דיגיטלי</td><td>±0.5% + 2dgt</td></tr><tr style='background: #f4f6f8; border-bottom: 1px solid #ccc;'><td style='padding: 15px;'>זרם (A)</td><td>אמפרמטר</td><td>±1%</td></tr><tr style='background: #fff; border-bottom: 1px solid #ccc;'><td style='padding: 15px;'>מהירות (RPM)</td><td>טכומטר אופטי</td><td>±1 RPM</td></tr><tr style='background: #f4f6f8;'><td style='padding: 15px;'>מומנט (Nm)</td><td>מאזני כוח</td><td>±0.1 Nm</td></tr></table>
השפעת השגיאות: קיימת אי-ודאות בחישובי הנצילות (תלויה בריבוע הזרם), אך המגמות הכלליות של הגרפים נשמרו בצורה מובהקת.
סיכום ומסקנות
מקבילי (Shunt)
מהירות יציבה. אידיאלי ליישומים הדורשים קצב קבוע תחת עומס משתנה.
טורי (Series)
מומנט התנעה אדיר. מסוכן ללא עומס (Speed Runaway). מתאים להנעה/רכב.
מרוכב (Compound)
פשרה טובה: מומנט התנעה משופר משאנט, אך ללא סיכון התבדרות של טורי.
נפרד (Separate)
שליטה ובקרה אופטימלית. דורש שני ספקי כוח נפרדים.
- מנועי זרם ישר
- מעבדת מכונות
- עירור טורי
- עירור מקבילי
- הנדסת חשמל
- dc motors
- electrical engineering