





Autonomous Satellite Docking: GNC Architecture & Missions
A technical study of autonomous satellite docking, GNC architecture, sensor fusion, and missions like ISRO SpaDeX, SpaceX Crew Dragon, and NASA Orbital Express.
Nagarjuna College of Engineering and Technology
AUTONOMOUS SATELLITE DOCKING SYSTEM
A Study of GNC Architecture, Sensor Fusion & Global Missions
Presented by: Nagarjuna College of Engineering & Technology
May 2026
01 / INTRODUCTION
WHAT IS AUTONOMOUS SATELLITE DOCKING?
An autonomous satellite docking system enables a chaser spacecraft to approach, align with, capture, and mechanically mate with a target vehicle — WITHOUT continuous human piloting.
🛰️
CHASER → TARGET
One vehicle actively maneuvers toward a passive or semi-passive target
⚙️
GNC SYSTEM
Guidance, Navigation & Control manages the entire approach chain
🔗
SOFT CAPTURE
Low-impact contact (~10 mm/s), rigidization, power & data transfer
Nagarjuna College of Engineering and Technology
02 / TECHNOLOGY
KEY COMPONENTS & TECHNOLOGIES
📡
SENSOR SUITE
GNSS, Laser Range Finder, LIDAR, cameras, videometer, rendezvous sensors, proximity sensors
🧭
GNC SYSTEM
Guidance: approach path & hold points | Navigation: 6-DOF state estimation | Control: thruster commands
📶
COMMUNICATION
Inter-satellite links (ISL), GNSS-based RODP, VHF/UHF transceivers for state sharing
🤖
AI & AUTOMATION
Rule-based sequencing, sensor fusion, EKF/UKF filters, fault detection & adaptive control
🔩
DOCKING MECHANISM
Androgynous peripheral design, soft capture, rigidization, structural hooks, umbilical connection
🛡️
FAULT MANAGEMENT
Hold points, retreat modes, redundant sensing, abort logic, non-explosive release
03 / ANALYSIS
ADVANTAGES & DISADVANTAGES
✅ ADVANTAGES
⚠️ DISADVANTAGES
PRECISION UNDER PRESSURE
Tight approach corridors, ~10 mm/s contact velocity, faster than human teleoperation
REDUCED HUMAN INTERVENTION
Lowers crew workload; feasible where comms delay prevents safe manual docking
COST EFFICIENCY & SCALABILITY
Reusable logic across missions; enables fuel depots, orbital factories, space stations
HIGH DEVELOPMENT COST
Extensive HIL, SIL, robotic & OIL testing required; time-consuming validation
SYSTEM COMPLEXITY
Integrated cyber-physical system: sensors, software, propulsion, mechanics — hidden failure modes
FAILURE RISK
Short-range final phase with limited reaction time; sensor faults can cause collision or abort
04 / LITERATURE REVIEW — NASA
ORBITAL EXPRESS & NASA DOCKING SYSTEM
ORBITAL EXPRESS MISSION
Demonstrated fully autonomous rendezvous, docking, hydrazine transfer & orbital unit replacement. Multi-sensor: visible, IR, laser, AVGS.
LESSONS LEARNED
Navigation filter design, sensor behavior under unexpected lighting, and abort-state assumptions are mission-critical design issues.
NASA DOCKING SYSTEM BLOCK 1
Direct-drive electromechanical Stewart Platform with 6 actuators. 12 structural hooks for rigid mate.
CAPTURE ENVELOPE
Axial: 3–6 cm/s | Lateral: ≤4 cm/s | Misalignment: ≤11 cm lateral, ≤5° angular
Source: NASA Technical Reports Server — ntrs.nasa.gov
05 / LITERATURE REVIEW — SPACEX
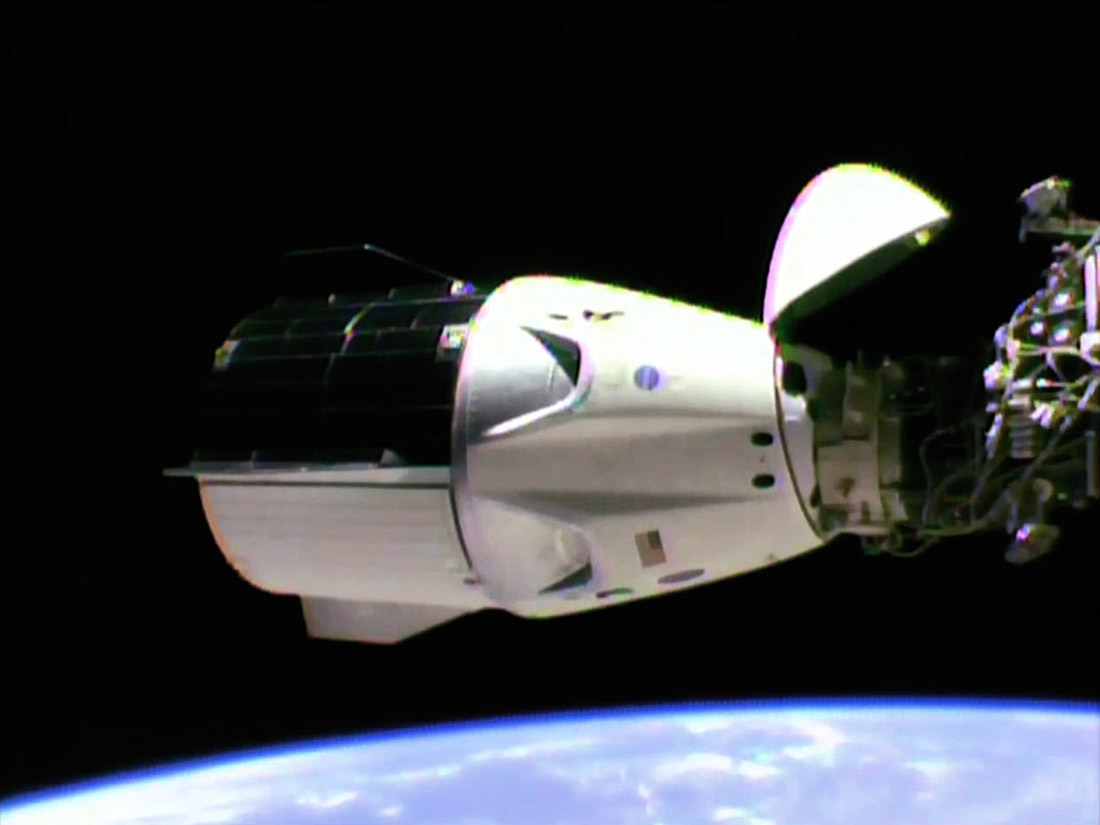
CREW DRAGON: OPERATIONAL MATURITY
<strong style='color:#ffffff; font-family:Orbitron, sans-serif; letter-spacing:1px;'>1. 🚀 LIFTOFF</strong> <span style='color:#aebdd2;'>— Falcon 9 lofts Dragon to orbit; stages separate</span>
<strong style='color:#ffffff; font-family:Orbitron, sans-serif; letter-spacing:1px;'>2. 🔄 ORBIT ACTIVATION</strong> <span style='color:#aebdd2;'>— Dragon activates propulsion, life support & thermal systems</span>
<strong style='color:#ffffff; font-family:Orbitron, sans-serif; letter-spacing:1px;'>3. 🔥 PHASING BURNS</strong> <span style='color:#aebdd2;'>— Delta-V maneuvers to catch up with ISS</span>
<strong style='color:#ffffff; font-family:Orbitron, sans-serif; letter-spacing:1px;'>4. 📡 APPROACH INITIATION</strong> <span style='color:#aebdd2;'>— Comms link with ISS; final orbit burn</span>
<strong style='color:#ffffff; font-family:Orbitron, sans-serif; letter-spacing:1px;'>5. 🎯 PROXIMITY OPS</strong> <span style='color:#aebdd2;'>— Autonomous approach along docking axis from ~150 m</span>
<strong style='color:#ffffff; font-family:Orbitron, sans-serif; letter-spacing:1px;'>6. 🔗 DOCKING</strong> <span style='color:#aebdd2;'>— Final autonomous dock; pressurization, hatch open, crew ingress</span>
Demo-1: Dragon retreated to ~180 m, then autonomously docked from ~20 m — proving crew-rated autonomous docking.
Source: NASA Space Station Blog / SpaceX Mission ISS — spacex.com
06 / ISRO SpaDeX MISSION
INDIA'S INDIGENOUS SPACE DOCKING EXPERIMENT
SpaDeX — Space Docking Experiment | Launched by PSLV-C60
Source: ISRO.gov.in — isro.gov.in/mission_SpaDeX.html
Dec 2024
PSLV-C60 launches both ~220 kg spacecraft into 470 km orbit at 55° inclination
Jan 16, 2025
FIRST DOCKING
Successfully demonstrated in LEO
Mar 13, 2025
UNDOCKING
Successful separation & post-docking control
Apr 20, 2025
SECOND AUTONOMOUS DOCKING
15 m to dock, fully autonomous
Apr 21, 2025
BIDIRECTIONAL POWER TRANSFER
~4 minutes between docked satellites
07 / SPADEX — MISSION CONCEPT
MISSION ARCHITECTURE & INDIGENOUS TECHNOLOGIES
Two ~220 kg spacecraft launched simultaneously by PSLV-C60 into 470 km circular orbit (55° inclination). Progressive rendezvous: 20 km → 5 km → 1.5 km → 500 m → 225 m → 15 m → DOCK. After undocking, both satellites operate independently for up to 2 years.
⚙️
DOCKING MECHANISM
Low-impact androgynous peripheral system; 450 mm; 2 motors; 10 mm/s approach
📡
SENSOR SUITE (×4)
LRF+retroreflectors (6000–200m), Rendezvous Sensors, PDS, Video Monitor + MES
⚡
POWER TRANSFER
Bidirectional electrical power transfer demonstrated between docked satellites
🧭
RODP PROCESSOR
GNSS-based Novel Relative Orbit Determination & Propagation; carrier-phase differential
📻
ISL COMMUNICATION
Inter-satellite VHF/UHF link with embedded intelligence and state awareness
🤖
AUTONOMOUS GNC
V-bar strategy with n-Pulse, Glideslope & PV guidance algorithms
🔬
SIMULATION TESTBEDS
Digital, HIL, SIL, OIL, and robotic simulation validation
08 / COMPARATIVE ANALYSIS
GLOBAL DOCKING MISSIONS — COMPARISON
NASA Orbital Express
Multi-sensor autonomous RPOD
Sensor robustness & filter design are mission-critical
✅ Demonstrated
NASA DS Block 1
Stewart Platform soft capture
Strong tolerance to terminal alignment & rate errors
✅ Operational
ESA ATV
GPS + videometer/telegoniometer
Reliable phased autonomy with high safety supervision
✅ Retired
SpaceX Crew Dragon
Autonomous crew-rated ISS docking
Operational proof of mature autonomous docking
✅ Operational
ISRO SpaDeX
Small-sat indigenous sensors + power transfer
National capability with repeat autonomous docking
✅ Achieved 2025
09 / RESEARCH OBJECTIVES
OBJECTIVES OF THE PROPOSED STUDY
01
DEFINE COMPLETE ARCHITECTURE
Design full docking system: sensor suite, relative navigation estimator, guidance logic, attitude & translation control, docking interface, and fault management.
02
ANALYZE NAVIGATION ACCURACY
Study transition from far-range GNSS estimation → close-range optical/laser relative navigation across all approach phases.
03
COMPARE CONTROL STRATEGIES
Evaluate conventional PID & LQR vs. advanced adaptive / AI-assisted control for final approach and disturbance rejection.
04
EVALUATE REALISTIC CONDITIONS
Test under sensor noise, eclipse lighting, comms interruptions, target attitude error, plume disturbance, and actuator uncertainty.
Based on lessons from Orbital Express, ATV, Crew Dragon & SpaDeX
10 / CONCLUSION
KEY TAKEAWAYS
🛰️
LAYERED ARCHITECTURE
Success depends on sensor redundancy, accurate nav, conservative guidance, low-impact capture, & rigorous validation.
🇺🇸
NASA CONTRIBUTION
Contact-tolerant hardware & fault-aware navigation (Orbital Express + DS Block 1).
🚀
SPACEX PROOF
Autonomous docking matured to a highly repeatable operational service.
🇮🇳
ISRO ACHIEVEMENT
SpaDeX: compact, indigenous, cost-effective — docking, undocking, repeat docking, power transfer all proven in 2025.
FUTURE SCOPE
🛢️
Orbital Fuel Depots
🤖
Robotic Servicing
🗑️
Active Debris Removal
🏗️
In-Space Assembly
🌕
Lunar Mission Support (Chandrayaan-4)
A foundation for the future of human spaceflight
11 / REFERENCES
SOURCES & CITATIONS
ISRO — SpaDeX Mission | isro.gov.in/mission_SpaDeX.html
ISRO — SpaDeX Undocking Successful, Mar 13, 2025 | isro.gov.in
ISRO — Second Docking & Power Transfer, Apr 21, 2025 | isro.gov.in
McFatter et al. — NASA's New Direct Electric Docking System | NASA NTRS 2018 | ntrs.nasa.gov
Dennehy et al. — Orbital Express Demonstration Mission Summary | NASA NTRS 2011 | ntrs.nasa.gov
ESA — ATV Rendezvous in Space, Feb 2008 | esa.int
ESA — ATV Completes Final Automated Docking, Aug 2014 | esa.int
ESA — State of the Art in Automatic Rendezvous, Apr 2004 | esa.int
SpaceX — Mission: ISS | spacex.com/humanspaceflight/iss
NASA — SpaceX Crew Dragon Successfully Docks to Station, Mar 2019 | nasa.gov
Jasiobedzki et al. — Autonomous Satellite RVD using LIDAR | SPIE 2005
Guglieri et al. — GNC Algorithms for Spacecraft RVD | Acta Astronautica, 2014
Nagarjuna College of Engineering and Technology — Autonomous Satellite Docking System
May 2026
- satellite-docking
- gnc-system
- space-technology
- isro-spadex
- spacex-dragon
- autonomous-systems
- aerospace-engineering