



זיהוי הולכי רגל ורכבים ב-MATLAB: עיבוד תמונה וסיכונים
פרויקט המציג מערכת לזיהוי אובייקטים והערכת סיכונים בכביש באמצעות MATLAB וראייה ממוחשבת קלאסית ללא למידה עמוקה.
זיהוי הולכי רגל ורכבים והערכת סכנה
פרויקט עיבוד תמונה ב-MATLAB
מגישה: מרווא עבד אל רזאק (ת"ז: 325604197)<br>מרצה: ד"ר גיא לשם
תיאור הפרויקט
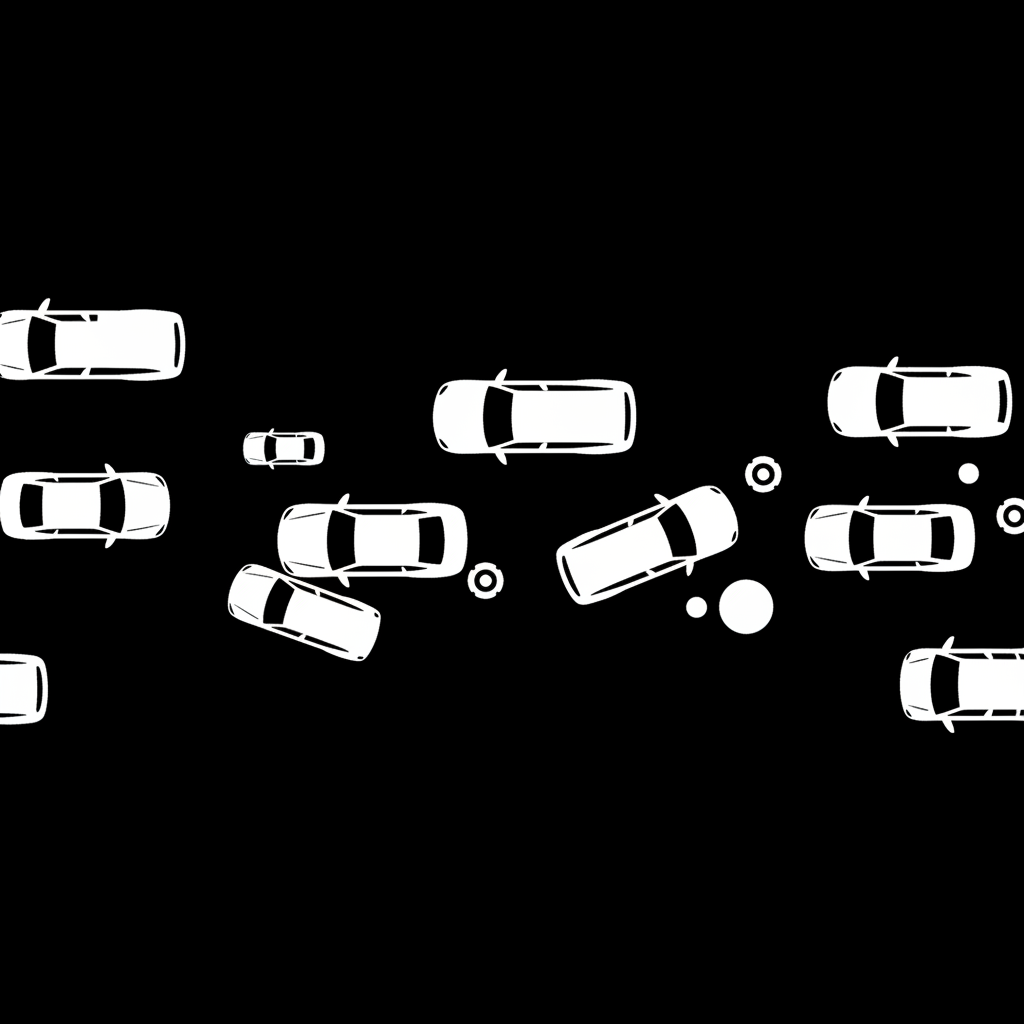
המערכת מקבלת סרט וידיאו ממצלמה קדמית ברכב. האלגוריתם מבצע זיהוי של הולכי רגל ורכבים, ומעריך את רמת הסכנה בזמן אמת. הפלט הוא וידיאו המעובד עם תיבות תחימה (Bounding Boxes) בצבעים המייצגים את רמת הסיכון: אדום, צהוב או ירוק.
הגדרת הבעיה
תאונות דרכים רבות נגרמות בשל אי-זיהוי בזמן או היסח דעת.
קושי להבדיל בין סוגי האובייקטים: רכב (גדול, צפוי) מול הולך רגל (פגיע, לא צפוי).
צורך בתיעדוף: לא מספיק לזהות, חייבים לדעת מי מהווה איום מידי.
אתגר טכני: פתרון הבעיה באמצעות ראייה ממוחשבת קלאסית וללא Deep Learning.
מטרות הפרויקט
<ul><li>זיהוי וסימון אובייקטים (הולכי רגל ורכבים) בתיבות תחימה.</li><li>הערכת מרחק יחסי לפי גודל ומיקום בתמונה.</li><li>חישוב ציון סכנה (גבוה/בינוני/נמוך) והצגה ויזואלית לנהג.</li></ul>
חשיבות הפרויקט (ADAS)
מבחינה מעשית
משמש כ'עיניים נוספות' לנהג, משפר מודעות ומפחית סיכון לתאונות ע"י הסבת תשומת לב לאובייקטים מסוכנים.
מבחינה אקדמית
יישום מלא של עיבוד תמונה: מסגמנטציה וניקוי רעשים ועד לוגיקה של קבלת החלטות, ללא הסתמכות על קופסה שחורה של AI.
פתרון מוצע: MATLAB
פיתוח אלגוריתם המעבד את הוידאו פריים-אחר-פריים (Frame-by-Frame). הגישה מתבססת על עיבוד תמונה מורפולוגי וניתוח גיאומטרי, ולא על רשתות נוירונים.
שלב 1: עיבוד מקדים (Pre-processing)
<ul><li>קריאת הוידאו וטעינת פריים בודד.</li><li>המרה לגווני אפור (Grayscale) לצמצום סיבוכיות.</li><li>סינון רעשים ראשוני כדי לשפר את איכות הסגמנטציה.</li></ul>
שלב 2: סגמנטציה ומורפולוגיה
במקום Labeled Data, אנו משתמשים בפעולות מורפולוגיות:
<ul><li><b>סף (Thresholding/Binarization):</b> הפרדה בין אובייקטים לרקע.</li><li><b>פתיחה (Opening):</b> הסרת רעשים קטנים ונקודתיים.</li><li><b>סגירה (Closing):</b> חיבור אזורים קרובים ליצירת צורה שלמה (Blob) של האובייקט.</li></ul>
שלב 3: סיווג והערכת סכנה
האלגוריתם מנתח את המאפיינים הגיאומטריים של כל 'Blob' (אזור מחובר):
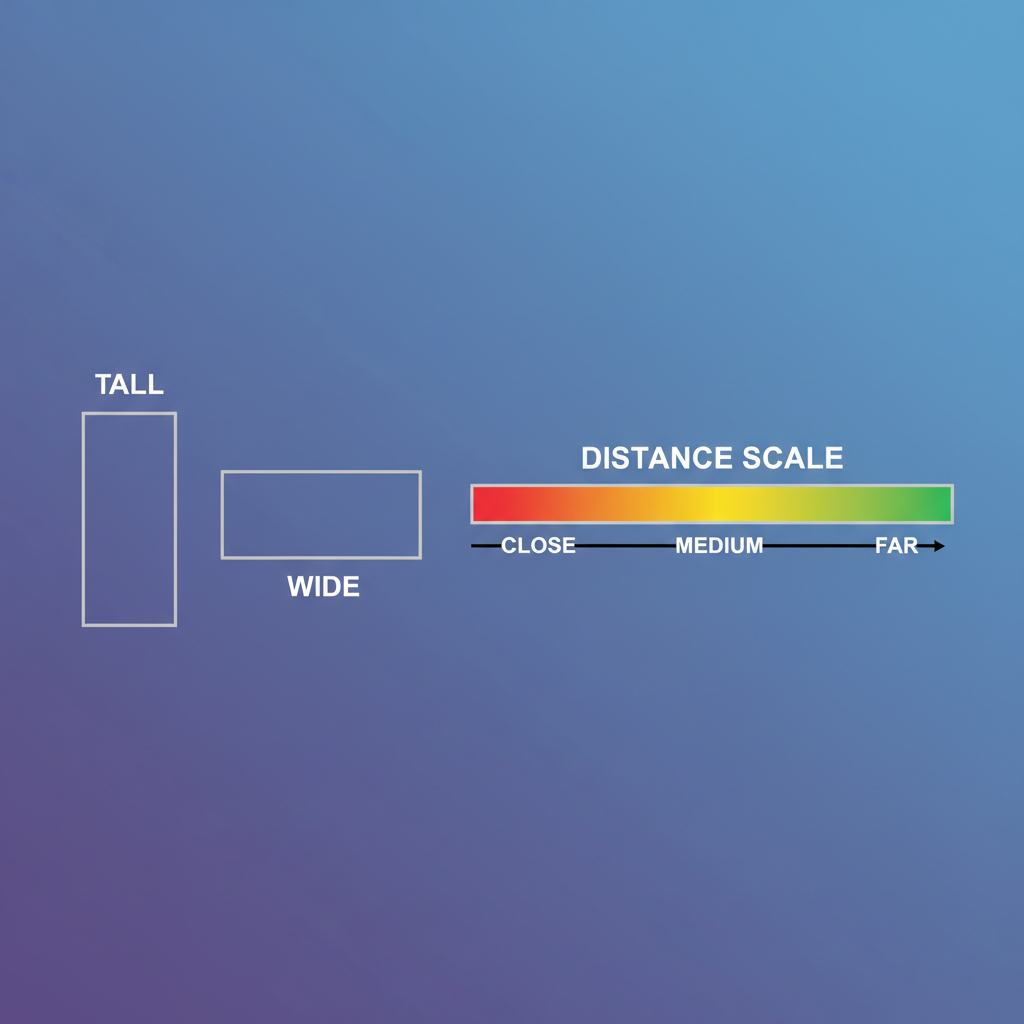
<b>סיווג:</b> יחס גובה/רוחב (Aspect Ratio). רכב לרוב רחב יותר, אדם לרוב גבוה וצר.
<b>סכנה (צבע התיבה):</b><br>🔴 אדום: אובייקט גדול במרכז (קרוב מאוד).<br>🟡 צהוב: אובייקט בגודל בינוני.<br>🟢 ירוק: אובייקט קטן או בצידי הפריים (רחוק).
סיכום ומסקנות
הוצעה מערכת לזיהוי ותיעדוף סכנות בכביש באמצעות MATLAB ושיטות קלאסיות.
האלגוריתם מצליח להבדיל בין סוגי אובייקטים לפי מורפולוגיה ולהעריך מרחק.
הויזואליזציה (רמזור צבעים) מסייעת לנהג בקבלת החלטות מהירה.
עבודה עתידית: שיפור דיוק בתנאי לילה ושילוב נתוני מהירות.
- matlab
- image-processing
- adas
- computer-vision
- object-detection
- עיבוד-תמונה
- ראייה-ממוחשבת