

Commande PID pour Articulation de Prothèse Robotique
Découvrez comment optimiser la précision d'une prothèse robotique via un asservissement PID et une boucle de rétroaction pour améliorer l'autonomie.
Commande par rétroaction pour l'ajustement précis de la position d'une articulation robotique
EL AQANI Mohamed Taha
Filière : MP – Année 2025-2026
Lycée : Lycée Technique Mohammedia
Restaurer l'autonomie par la prothèse robotique
La perte de préhension chez les personnes amputées constitue un handicap majeur affectant profondément leur autonomie au quotidien. Si les prothèses myoélectriques modernes permettent d'actionner des doigts artificiels par détection de signaux musculaires, elles souffrent encore d'un manque de précision et de stabilité dans le contrôle fin des mouvements. Ce projet TIPE se fixe pour objectif d'améliorer la commande en position d'une articulation robotique en concevant et réglant un correcteur PID, afin d'obtenir des mouvements plus fluides, plus stables et véritablement adaptés aux exigences d'assistance humaine.
Problématique scientifique
Pour qu'une prothèse robotique restitue véritablement l'autonomie à une personne amputée, la maîtrise de la position de chaque articulation motorisée ne peut tolérer ni imprécision ni instabilité. Un simple geste de préhension exige une synchronisation rigoureuse entre consigne, correction et retour de mesure.
Comment concevoir, modéliser et implémenter expérimentalement une boucle de commande PID pour contrôler avec précision la position d'une articulation à un degré de liberté, afin de minimiser le temps de réponse à 5 %, annuler l'erreur statique et garantir l'absence de dépassement ?
Ce questionnement implique d'étudier la modélisation du système, la synthèse du correcteur PID, les enjeux de stabilité et de rapidité, ainsi que l'influence du cycle d'échantillonnage sur la qualité de la commande en boucle fermée.
Pour qu’une prothèse robotique restitue véritablement l’autonomie à une personne amputée, la maîtrise de la position de chaque articulation motorisée ne peut tolérer ni imprécision ni instabilité. Un simple geste de préhension exige une synchronisation rigoureuse entre consigne, correction et retour de mesure.
Comment concevoir, modéliser et implémenter expérimentalement une boucle de commande PID pour contrôler avec précision la position d’une articulation à un degré de liberté, afin de minimiser le temps de réponse à 5 %, annuler l’erreur statique et garantir l’absence de dépassement ?
Ce questionnement implique d’étudier la modélisation du système, la synthèse du correcteur PID, les enjeux de stabilité et de rapidité, ainsi que l’influence du cycle d’échantillonnage sur la qualité de la commande en boucle fermée.
Lien avec le thème : Boucles et cycles
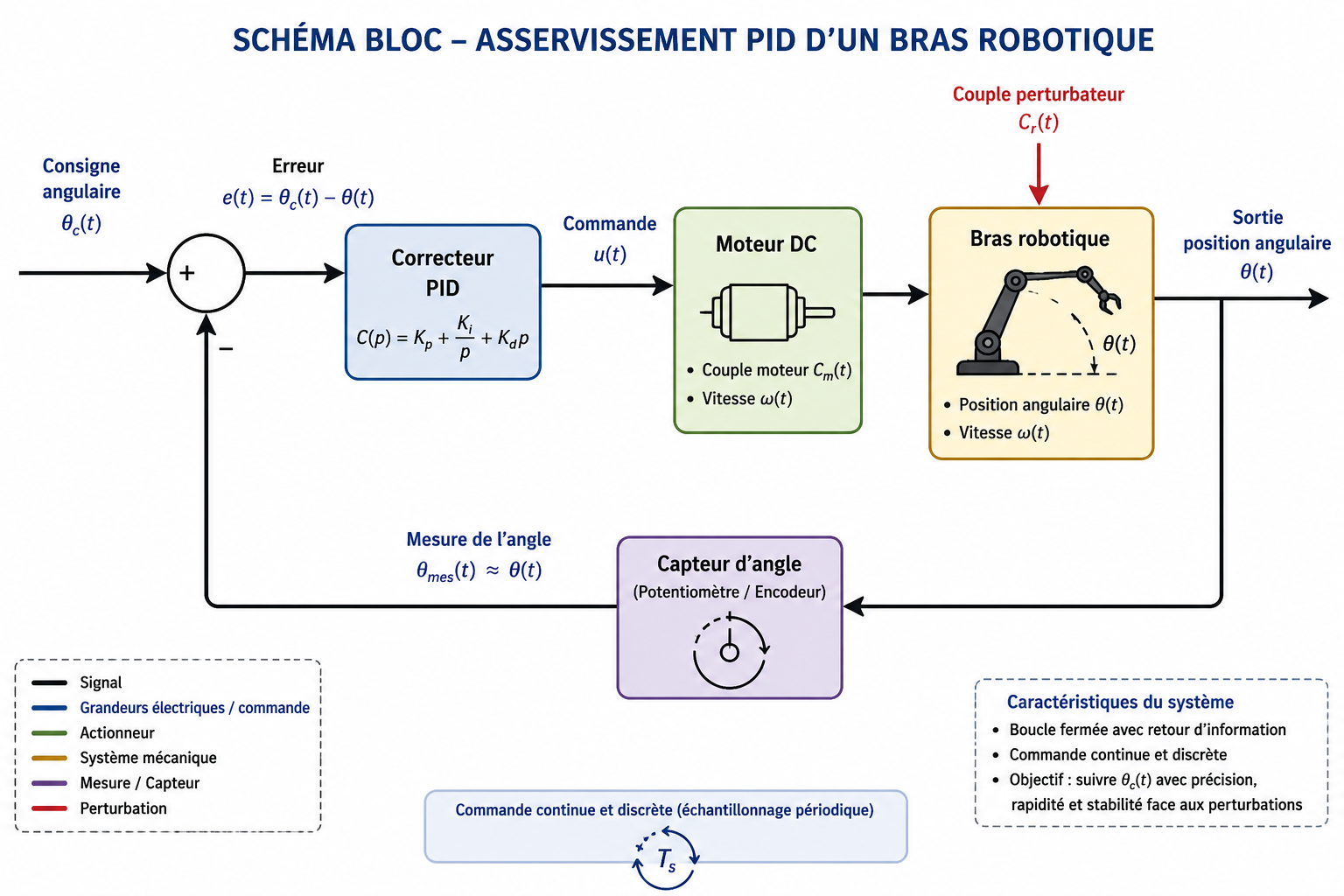
Au cœur de ce projet se trouve la boucle de rétroaction, séquence fondamentale par laquelle le système mesure en permanence l'écart angulaire entre la position réelle de l'articulation et la consigne désirée, calcule une erreur, puis génère une commande corrective. Cette logique mesure → comparaison → correction se répète indéfiniment, garantissant un ajustement continu et précis. La période d'échantillonnage Tₛ rythme cette répétition : c'est elle qui détermine la réactivité et la qualité du contrôle numérique. Ce double aspect — boucle fermée et cycle discret — est la condition nécessaire à la stabilité, à la rapidité et à la performance globale du système d'asservissement PID.
Boucle fermée d'asservissement PID
Pourquoi un seul degré de liberté (1 DDL) ?
Une prothèse de main ou de bras comporte de nombreuses articulations — doigts, poignet, coude — dont chacune nécessite sa propre commande. Pourtant, la logique de contrôle de base est identique pour toutes : une consigne angulaire est comparée à la position réelle mesurée, une erreur est calculée, et une commande corrective est envoyée au moteur. En se concentrant sur un seul degré de liberté (1 DDL), il devient possible d'approfondir rigoureusement l'étude de la boucle de rétroaction, de la discrétisation et du réglage du correcteur PID, sans complexité cinématique superflue. Les résultats obtenus sur ce modèle élémentaire sont directement généralisables à chaque articulation d'une prothèse réelle.
Une articulation parmi d'autres – le modèle 1 DDL est générique
- robotique
- tipe
- correcteur-pid
- asservissement
- prothèse
- automatique
- sciences-de-lingenieur