





Biological Algorithms: Bio-Inspired Maximal Independent Set
Learn how fruit fly sensory organ development inspires efficient distributed computing algorithms for sensor networks and swarm robotics.
Maximal Independent Set
A Biological Solution to a Distributed Computing Problem
Yaman Dahle, Leen Hassan
Why MIS Matters?
<div style="margin-bottom:40px; border-left: 5px solid #4fd1c5; padding-left: 20px;"><strong style="display:block; font-size:1.2em; color: #319795; margin-bottom:10px;">1. It works without one boss</strong>In real systems (Wi-Fi, sensors), there is no central controller. MIS lets the system organize itself and choose leaders automatically.</div><div style="border-left: 5px solid #fc8181; padding-left: 20px;"><strong style="display:block; font-size:1.2em; color: #e53e3e; margin-bottom:10px;">2. It avoids interference</strong>It makes sure important units (like routers) are not too close. This prevents conflicts and signal noise, whilst still covering everyone.</div>
It helps systems work without one boss
In real systems (Wi-Fi networks, sensors, traffic systems), there is no central controller. MIS lets the system organize itself and choose leaders automatically.
It avoids interference and chaos
MIS makes sure important units (like routers or controllers) are not too close to each other, which prevents conflicts, noise, or interference, while still covering everyone.
Informal Problem Definition
<p style="font-size:1.4em; line-height:1.5; color: #2d3748; margin-bottom:15px;">We consider a distributed system in which processors jointly solve a task, without any processor receiving all the inputs or observing all the outputs.</p><p style="font-size:1.4em; line-height:1.5; color: #2d3748;">Each processor communicates only with its immediate neighbors, and has no global knowledge of the system.</p>
<p style="font-size:1.4em; line-height:1.5; color: #2d3748; margin-bottom:15px;"><strong>The Goal:</strong> Select a subset of processors such that:</p><ul style="font-size:1.3em; line-height:1.5; color: #4a5568; margin:0; padding-left:25px;"><li>No two neighboring processors are selected.</li><li>Every processor is either selected or adjacent to a selected one.</li></ul>
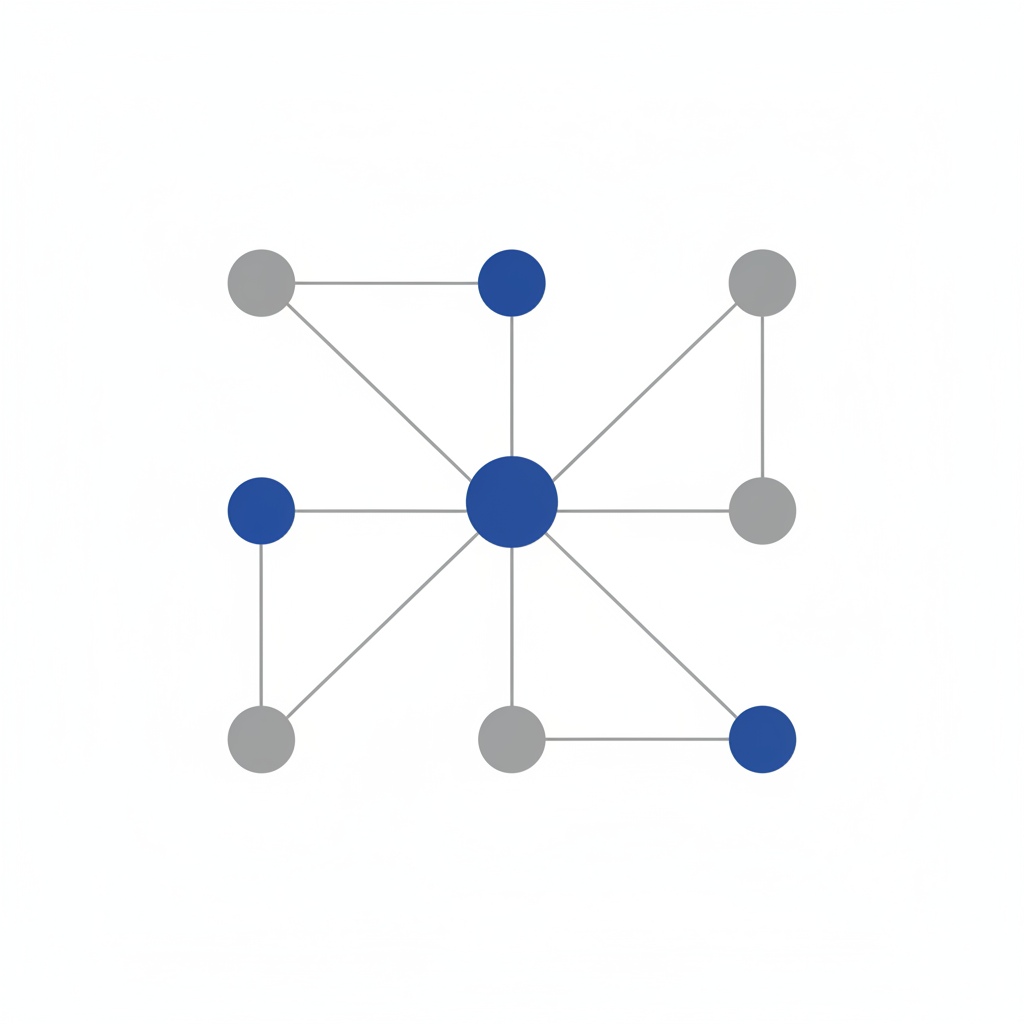
MIS: Maximal Independent Set
<ul style="list-style:none; padding:0;"><li style="margin-bottom:25px; font-size:1.1em;"><strong>🎯 Goal:</strong> Elect a set of local leaders in a network.</li><li style="margin-bottom:25px; color:#5fa6d5;"><strong>1. Independence:</strong> No two leaders can be connected (neighbors).</li><li style="color:#84b082;"><strong>2. Dominance:</strong> Every non-leader must be connected to at least one leader.</li></ul>
We are given a network (graph) of nodes and connections.<br>We need to find a set of nodes A such that:
<strong style="color: #2b6cb0; display:block; margin-bottom:10px;">Independence</strong>No two nodes in A are directly connected <span style="color:#718096;">(A is an independent set).</span>
<strong style="color: #2f855a; display:block; margin-bottom:10px;">Maximality</strong>Every node in the network is either in A or directly connected to a node in A <span style="color:#718096;">(A is maximal).</span>
This set A is called a Maximal Independent Set (MIS).
The "Greedy" Algorithm (Centralized)
<ol><li>Gather the entire graph topology in one central processor.</li><li>Select an arbitrary node <em>v</em> to join the MIS.</li><li>Remove <em>v</em> and all its neighbors from the graph.</li><li>Repeat until the graph is empty.</li></ol>
<strong>Major Drawback:</strong> Requires global knowledge. In massive networks (sensors, biology), no single node knows the whole specific topology.
<ol style="margin:0; padding-left:30px;"> <li style="margin-bottom:10px;">Pick a node -> Add to <strong>Set A</strong>.</li> <li style="margin-bottom:10px;">Remove its neighbors.</li> <li>Repeat until graph is empty.</li> </ol>
<strong>The Problem:</strong> It is <strong>Sequential</strong> (needs a central coordinator/Boss).<br>We need a <strong>Parallel</strong> solution (No Boss).
The Challenge: Symmetry Breaking
<p><strong>The Scenario:</strong><br>Imagine all nodes in the network are identical. They run the exact same code and wake up at the exact same time.</p> <p><strong>The Conflict:</strong><br>If Node A decides "I'll join the set!", its neighbor Node B (running the same logic) does the exact same thing.</p> <p style="color:#e53e3e; font-weight:bold;">Result: Deterministic decisions lead to conflicts or no progress.</p> <p><strong>The Solution:</strong><br>Introduce randomness so nodes can make different decisions and break symmetry.</p>
The Biological Coordination Problem
<div style="font-size: 44px; line-height: 1.4; color: #37474f;"> <p style="margin-bottom: 30px;">During the development of the <b>fly</b>, groups of identical cells must decide which will become sensory organs (SOPs).</p> <p style="margin-bottom: 30px;"><b>The Dilemma:</b> Any cell can be a leader, but <b>neighboring cells cannot both be selected</b>.</p> <p>There is <b>no central controller</b>. Each cell communicates only with its neighbors to create this perfect pattern.</p> </div>
How Symmetry Is Broken in the Fly
<strong>Delta-Notch Signaling:</strong><br><br>• A cell produces a protein called <strong>Delta</strong>.<br>• Delta binds to <strong>Notch</strong> receptors on neighbors.<br>• <strong>Effect:</strong> "If I am active (Delta), you stay quiet (Inhibited)."<br>• This is a 1-bit communication channel.
<div style="font-size: 38px; line-height: 1.4; color: #37474f;"> <p style="margin-bottom: 25px; font-weight: 500;">How do identical cells break the tie?</p> <ul style="list-style: none; padding: 0;"> <li style="margin-bottom: 25px; border-left: 6px solid #009688; padding-left: 20px;"> <b>Feedback Loop:</b> Ideally, cells compete. If one gets slightly ahead, it suppresses its neighbors. </li> <li style="margin-bottom: 25px; border-left: 6px solid #009688; padding-left: 20px;"> <b>The Signal:</b> "I am becoming a Leader (SOP), so you must stay as normal skin!" </li> <li style="border-left: 6px solid #009688; padding-left: 20px;"> <b>The Result:</b> A specialized cell surrounded by non-specialized ones. </li> </ul> </div>
<div style="font-size:0.9em;"> <p style="margin-bottom:15px; border-left:4px solid #3498db; padding-left:15px;">All cells start in the same state</p> <p style="margin-bottom:15px; border-left:4px solid #3498db; padding-left:15px;">Cells gradually increase their tendency to become SOP</p> <p style="margin-bottom:15px; border-left:4px solid #3498db; padding-left:15px;">Small random differences appear between neighboring cells</p> <p style="margin-bottom:15px; border-left:4px solid #3498db; padding-left:15px;">A cell that becomes slightly ahead inhibits its neighbors</p> <p style="margin-bottom:15px; border-left:4px solid #3498db; padding-left:15px;">Inhibition amplifies this difference and prevents neighbors from catching up</p> <div style="margin-top:30px; background:#e8f4fd; padding:20px; border-radius:15px; color:#2c3e50; font-weight:600;"> Outcome: A single SOP is selected from a symmetric group. </div> </div>
From random noise to perfect order
From Biology to Algorithm
<div style="width:100%; max-width:1400px; margin:0 auto;"> <p style="margin-bottom:40px; color:#34495e; font-style:italic; text-align:center; font-size:0.8em;">How we translate the fly's method into code:</p> <ul style="list-style:none; padding:0;"> <li style="margin-bottom:30px; border-left:8px solid #3498db; padding-left:30px;"> Nodes behave like cells </li> <li style="margin-bottom:30px; border-left:8px solid #3498db; padding-left:30px;"> Decisions are probabilistic, not deterministic </li> <li style="margin-bottom:30px; border-left:8px solid #3498db; padding-left:30px;"> Small randomness breaks symmetry </li> <li style="margin-bottom:30px; border-left:8px solid #3498db; padding-left:30px;"> Local inhibition ↔ neighbors cannot both join MIS </li> </ul> <div style="margin-top:60px; background:#e8f6f3; padding:40px; border-radius:20px; color:#16a085; font-weight:600; border-left: 10px solid #1abc9c; text-align:center; box-shadow: 0 10px 30px rgba(0,0,0,0.05);"> Key Message: The algorithm mimics the biological process. </div> </div>
Mapping biological principles to computational rules
The Key Insight: Rate Change
Traditional algorithms need to know the number of neighbors (degree). <strong>Cells don't know their degree.</strong><br><br><strong>Biological Solution:</strong><br>Start with a very low probability of speaking up.<br>Gradually increase the probability over time.<br>This avoids an initial 'shouting match' (collisions).
Algorithm in Action
<strong>The 3-Step Cycle:</strong>
<strong>1. Broadcast (Red):</strong><br>Center node wakes up and yells "BEEP!"
<strong>2. Inhibit (Yellow):</strong><br>Now <strong>8 neighbors</strong> hear the beep and must stay "Quiet".
<strong>3. Parallel Leaders:</strong><br>Distant nodes can become LEADERS <strong>simultaneously</strong>.<br>This is how it scales!
Algorithm in Action
[ Insert Video / Simulation Here ]\n\nShow nodes blinking,\nchecking neighbors,\nand turning Blue (Selected)
<div style="margin-bottom: 30px;"><strong style="color: #e74c3c;">1. Wake Up</strong><br/>Each node wakes up with probability <em>p</em>.</div><div style="margin-bottom: 30px;"><strong style="color: #3498db;">2. Broadcast</strong><br/>Send "I'm here!" to neighbors.</div><div style="margin-bottom: 30px;"><strong style="color: #27ae60;">3. Decide</strong><br/>Silence? Join the set.<br/>Noise? Back off and try again.</div>
Video Placeholder: Simulation Demo
Algorithm Parameters
Key variables definitions
Rules
Executed by every node in parallel.
Nodes run this code in parallel
Communication is only local
// Algorithm for every Node v
Status = <strong>ACTIVE</strong>
<strong>WHILE</strong> (Status is ACTIVE):
1. Wake up with probability <em>p</em>
2. IF awake: Broadcast "BEEP" to neighbors
3. <strong>IF</strong> (Awake <strong>AND</strong> Heard no "BEEPs"):
-> Become LEADER (Exit)
4. <strong>ELSE IF</strong> (Heard a "BEEP" from neighbor):
-> Become FOLLOWER (Exit)
5. <strong>ELSE</strong>: Repeat next round
Table 1. MIS algorithm.
REPORTS 1. Algorithm: MIS (n, D) at node u 2. For i = 0 : logD 3. For j = 0 : M log n // M is constant derived below 4. * exchange 1 * 5. v = 0 6. With probability 1 / (2^(logD - i)) broadcast B to neighbors and set v = 1 7. If received message from neighbor, then v = 0 8. * exchange 2 * 9. If v = 1 then 10. Broadcast B; join MIS; exit the algorithm 11. Else 12. If received message B in this exchange, then mark node u inactive; exit the algorithm 13. End 14. End 15. End
MIS Algorithm
Proof of Correctness (Safety)
<strong>Lemma 1:</strong> No two nodes in MIS are connected.<br><br><em>Why?</em> A node only joins the MIS if it broadcasts AND receives no message. If two neighbors both broadcast, they both receive a message, so neither joins. They block each other.
<strong>Lemma 2:</strong> If a node exits without joining MIS, it must have a leader neighbor.<br><br><em>Why?</em> You only exit if you receive a 'Join' message from a neighbor who became a leader.
Lemma 1: Independence
Lemma 1: Probability of Success
There is a constant probability that a node joins the MIS or a neighbor joins in each round.
Lemma 2: Edge Removal Rate
In each phase, a constant fraction of edges are removed from the graph with high probability.
Lemma 3: Runtime Complexity
The algorithm terminates in O(log n) rounds with high probability.
How do we guarantee progress? We need a node to speak ALONE.<br><br>The algorithm adjusts the broadcast probability <em>p</em> to find the balance.
Everyone talks → <strong>Collision</strong>. No one hears clearly.
<em>p = 1 / d</em> (where d is neighbors).<br>Constant probability of success!
No one talks → <strong>Silence</strong>. Nothing happens.
No two nodes in the Independent Set (A) are connected.
A node only joins <i>A</i> if it broadcasts and hears nothing. If two neighbors transmit, they block each other. If one joins earlier, the neighbor becomes inactive immediately. Thus, neighbors can never join together.
Proof of Efficiency (Runtime)
<strong>Lemma 4:</strong> By the end of phase <em>i</em>, there are no nodes with degree > D/2^i.<br><br>Essentially, as the probability of shouting increases (doubles), high-degree nodes are very likely to be 'cleared out' (either join MIS or be inhibited).
<strong>Theorem 1:</strong> The algorithm finishes in <em>O(log N)</em> time.<br><br>This matches the speed of the best known computer algorithms, but uses much simpler (biological) assumptions.
When a node joins the MIS, it and its neighbors retire.<br><br>This means all the connections (edges) touching them are gone.<br><br>Even if the graph is huge, it "crumbles" very fast.
Lemmas 2 & 3: Exiting the Algorithm
Summary & Impact
<ul><li><strong>Biology solves computation:</strong> Flies solved distributed leader election millions of years ago.</li><li><strong>Constraint efficiency:</strong> Limited information (no degree knowledge) and limited bandwidth (1-bit) can still yield optimal speed.</li><li><strong>Application:</strong> Perfect for low-power Sensor Networks and nanoscale computing.</li></ul>
Because we remove a constant fraction of edges in every phase (Lemma 2), the size of the problem shrinks exponentially.<br><br>Even with <strong>billions</strong> of nodes, it finishes in just a few dozen rounds.
<strong>Theorem 1:</strong> The algorithm terminates in <strong>O(log n)</strong> time with high probability.
Lemma 4: Degree Reduction
Because we remove a constant fraction of edges in every phase...<br><br>The network collapses exponentially fast.<br><br>This creates the <strong>O(log n)</strong> runtime.
Comparison: Knowledge vs Ignorance
Bandwidth Efficiency
Robustness
Application: WSN
Swarm Robotics
Nature Algorithms
Limitations
Summary
Conclusion
References
Q&A
- bio-inspired-algorithms
- distributed-computing
- mis-algorithm
- computer-science
- biomimicry
- sensor-networks
- robotics