Estimation de Mouvement en Codage Vidéo : Block-Matching
Découvrez les principes de l'estimation de mouvement par block-matching, les critères SAD/SSD et l'impact de la taille des blocs sur le codage vidéo.
Estimation de mouvement en codage vidéo
Block-matching sur la séquence Foreman (CIF, YUV 4:2:0)
Projet MED — Noms Prénoms — Encadrant — Année
Contexte et objectif
Forte redondance temporelle entre deux images successives
Objectif : prédire l’image n à partir de l’image n−1
Méthode : estimation de mouvement par block-matching
Codage vidéo et mouvement
Estimation du mouvement
Recherche du déplacement des blocs entre deux images
Redondance temporelle
Les images successives sont très similaires
Codage vidéo
Prédiction + résiduel → réduction des données
Principe du Block-Matching
Division de l'image courante en blocs (ex: 16x16 pixels).
Recherche du bloc le plus similaire dans l'image de référence (n-1).
Critère de minimisation : SAD (Sum of Absolute Differences) ou MSE.
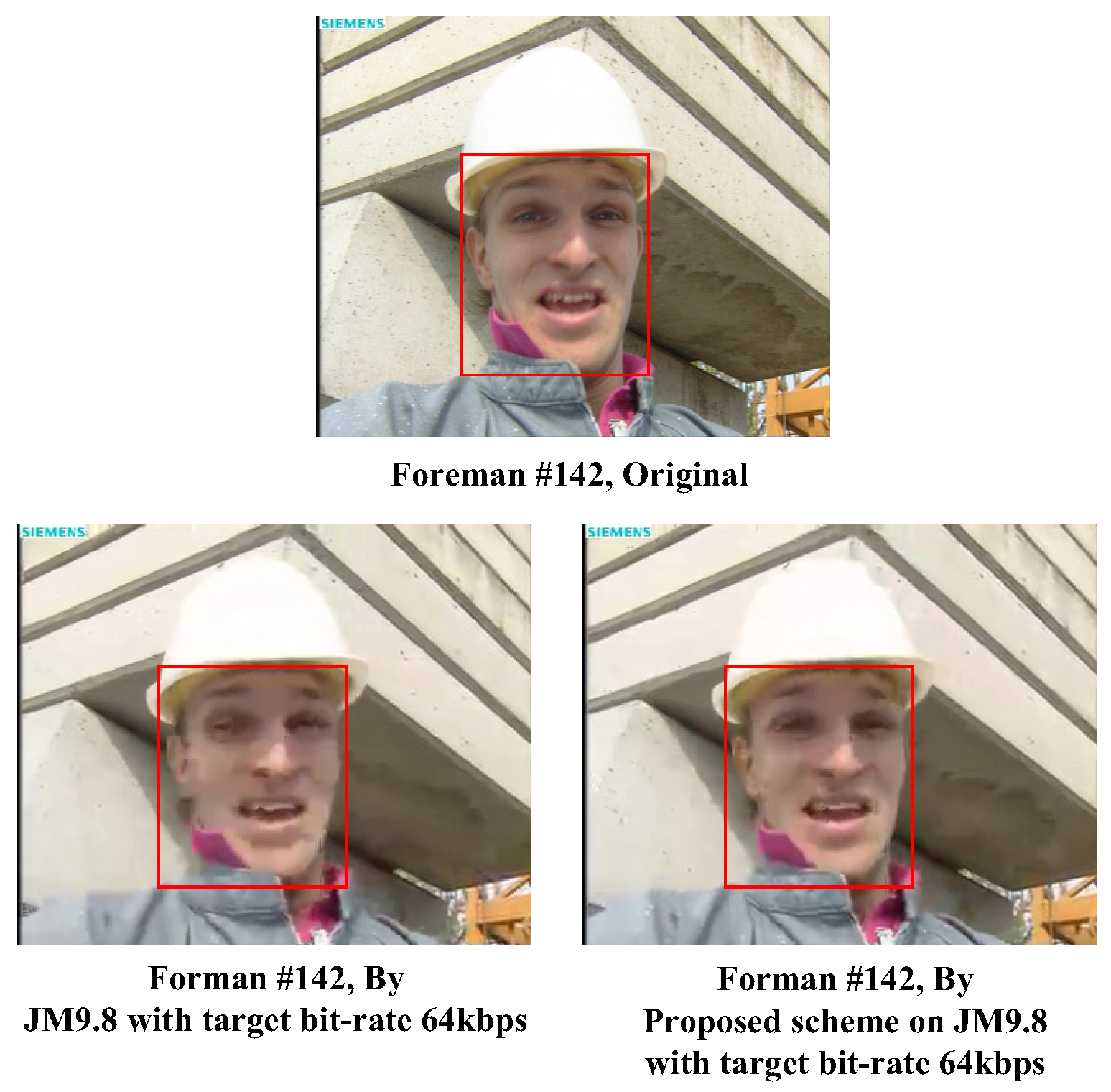
Le Cas d'Étude : Séquence Foreman
Analyse caractéristique : mouvement de caméra et expression faciale complexe.
Influence de la Taille de Bloc (Ex: SSD)
Les petits blocs (4x4) minimisent l'erreur (SSD) mais augmentent le coût de signalisation des vecteurs.
Performance : Gain en PSNR
Ligne bleue : Différence simple (Sans compensation).
Ligne verte : Avec compensation de mouvement (Block-matching 16x16).
Critères de Coût : SAD vs SSD
SAD (Sum of Absolute Differences)
Moins complexe (opérations entières uniquement). Préféré pour l'implémentation matérielle.
SSD (Sum of Squared Differences)
Pénalise fortement les grandes erreurs. Meilleure corrélation avec la qualité perceptuelle, mais plus coûteux en calcul.
Visualisation : L'Image Résiduelle
L'image de résidu (ou erreur) est obtenue en soustrayant le bloc prédit du bloc original.
On observe que l'énergie est concentrée sur les contours des objets en mouvement (visage de Foreman).
Limites de l'approche Block-Matching
Zones d'Occultation
Le block-matching échoue lorsque des zones, auparavant cachées, apparaissent.
Mouvements Complexes
Les rotations, zooms ou déformations ne sont pas bien modélisés par une simple translation.
Ambiguïté (Aperture Problem)
Des zones uniformes (ciel, mur) peuvent entraîner des vecteurs de mouvement aléatoires.
Conclusion
Gain d'entropie significatif : la variance du résiduel est minimale comparée à l'image originale.
Compromis : La recherche exhaustive (Full Search) offre le meilleur PSNR mais est coûteuse.
Importance des paramètres : La taille de bloc et la fenêtre de recherche doivent être adaptées au contenu (Foreman = mouvements modérés).
- codage-vidéo
- block-matching
- compression-vidéo
- psnr
- sad-ssd
- traitement-d-image
- h264